A nodelet mixin that allows to use a tf2_ros::Buffer provided by the nodelet manager (which should save some computations). If this nodelet has also the StatefulNodelet mixin, the automatically created non-shared buffer is nodelet-aware (you can also pass a NodeletAwareTfBuffer to setBuffer()). That means any TF lookups done via this->getBuffer() will be able to correctly end when the nodelet is being unloaded (which normally hangs: https://github.com/ros/geometry2/issues/381).
More...
#include <nodelet_with_shared_tf_buffer.hpp>
Public Member Functions | |
| ::cras::NodeletAwareTFBuffer & | getBuffer () const override |
Get the TF buffer used by the nodelet. If none has been set by setBuffer(), a buffer is automatically created. More... | |
| ::std::shared_ptr<::cras::NodeletAwareTFBuffer > | getBufferPtr () const |
| NodeletWithSharedTfBuffer () | |
| virtual void | onInit () |
| void | reset () override |
| Reset the TF buffer. If a shared buffer is used, it is not reset by this call and its owner is responsible. More... | |
| void | setBuffer (const ::std::shared_ptr<::tf2_ros::Buffer > &buffer) override |
| Set the TF buffer to be used by the nodelet. If this method is not called, a standalone buffer is created. More... | |
| bool | usesSharedBuffer () const override |
Whether the buffer set using setBuffer() is used or a standalone buffer has been automatically created. More... | |
| ~NodeletWithSharedTfBuffer () override | |
 Public Member Functions inherited from nodelet::Nodelet Public Member Functions inherited from nodelet::Nodelet | |
| void | init (const std::string &name, const M_string &remapping_args, const V_string &my_argv, ros::CallbackQueueInterface *st_queue=NULL, ros::CallbackQueueInterface *mt_queue=NULL) |
| Nodelet () | |
| virtual | ~Nodelet () |
Private Attributes | |
| ::std::unique_ptr<::cras::impl::NodeletWithSharedTfBufferPrivate > | data |
| PIMPL. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from nodelet::Nodelet | |
| ros::CallbackQueueInterface & | getMTCallbackQueue () const |
| ros::NodeHandle & | getMTNodeHandle () const |
| ros::NodeHandle & | getMTPrivateNodeHandle () const |
| const V_string & | getMyArgv () const |
| const std::string & | getName () const |
| ros::NodeHandle & | getNodeHandle () const |
| ros::NodeHandle & | getPrivateNodeHandle () const |
| const M_string & | getRemappingArgs () const |
| ros::CallbackQueueInterface & | getSTCallbackQueue () const |
| std::string | getSuffixedName (const std::string &suffix) const |
| Protected Member Functions inherited from cras::TimeJumpResettable | |
| void | checkTimeJump () |
| Check if ROS time has not jumped back. If it did, call reset(). More... | |
| virtual void | checkTimeJump (const ::ros::Time &now) |
| Check if ROS time has not jumped back. If it did, call reset(). More... | |
| void | initRos (const ::ros::NodeHandle &pnh) override |
| Initialize the ROS part of the interface - subscriber to /reset and ~reset topics, read time jump limits. More... | |
| void | startAutoCheckTimeJump () |
| Start a background 1 Hz timer that automatically checks for time jumps. More... | |
| virtual void | startAutoCheckTimeJump (const ::ros::WallRate &rate) |
| Start a background timer that automatically checks for time jumps. More... | |
| virtual void | stopAutoCheckTimeJump () |
| Stop the timer that automatically checks for time jumps. More... | |
| TimeJumpResettable (const ::cras::LogHelperPtr &log) | |
| Create the resettable interface. To also wire up to the reset topics and time jump resets, call initRos(). More... | |
| ~TimeJumpResettable () override | |
| Protected Member Functions inherited from cras::Resettable | |
| Resettable (const ::cras::LogHelperPtr &log) | |
| Create the resettable interface. To also wire up to the reset topics, call initRos(). More... | |
| virtual | ~Resettable () |
Detailed Description
template<typename NodeletType = ::nodelet::Nodelet>
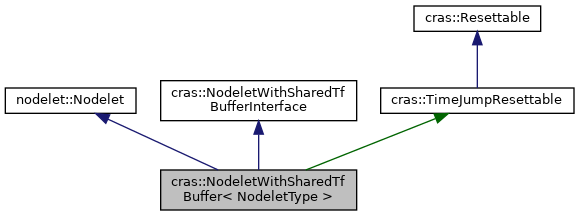
struct cras::NodeletWithSharedTfBuffer< NodeletType >
A nodelet mixin that allows to use a tf2_ros::Buffer provided by the nodelet manager (which should save some computations). If this nodelet has also the StatefulNodelet mixin, the automatically created non-shared buffer is nodelet-aware (you can also pass a NodeletAwareTfBuffer to setBuffer()). That means any TF lookups done via this->getBuffer() will be able to correctly end when the nodelet is being unloaded (which normally hangs: https://github.com/ros/geometry2/issues/381).
- Template Parameters
-
NodeletType Type of the base nodelet.
Definition at line 76 of file nodelet_with_shared_tf_buffer.hpp.
Constructor & Destructor Documentation
◆ NodeletWithSharedTfBuffer()
| cras::NodeletWithSharedTfBuffer< NodeletType >::NodeletWithSharedTfBuffer | ( | ) |
◆ ~NodeletWithSharedTfBuffer()
|
override |
Member Function Documentation
◆ getBuffer()
|
overridevirtual |
Get the TF buffer used by the nodelet. If none has been set by setBuffer(), a buffer is automatically created.
- Returns
- The buffer.
- Note
- This buffer only offers the timeouting versions of canTransform() and lookupTransform(). It does not offer setTransform() and many other functions. User getRawBuffer() on the returned instance to get a tf2::BufferCore that offers the missing non-time-aware functionality.
Implements cras::NodeletWithSharedTfBufferInterface.
◆ getBufferPtr()
| ::std::shared_ptr<::cras::NodeletAwareTFBuffer> cras::NodeletWithSharedTfBuffer< NodeletType >::getBufferPtr | ( | ) | const |
◆ onInit()
|
virtual |
Implements nodelet::Nodelet.
Reimplemented in cras::FilterChainNodelet< F >, cras::NodeletBase< BaseNodelet >, and cras::NodeletBase<::nodelet::Nodelet >.
◆ reset()
|
overridevirtual |
Reset the TF buffer. If a shared buffer is used, it is not reset by this call and its owner is responsible.
Implements cras::NodeletWithSharedTfBufferInterface.
◆ setBuffer()
|
overridevirtual |
Set the TF buffer to be used by the nodelet. If this method is not called, a standalone buffer is created.
- Parameters
-
[in] buffer The buffer to use.
Implements cras::NodeletWithSharedTfBufferInterface.
◆ usesSharedBuffer()
|
overridevirtual |
Whether the buffer set using setBuffer() is used or a standalone buffer has been automatically created.
- Returns
- Whether the buffer set using
setBuffer()is used or a standalone buffer has been automatically created.
Implements cras::NodeletWithSharedTfBufferInterface.
Member Data Documentation
◆ data
|
private |
PIMPL.
Definition at line 97 of file nodelet_with_shared_tf_buffer.hpp.
The documentation for this struct was generated from the following file: