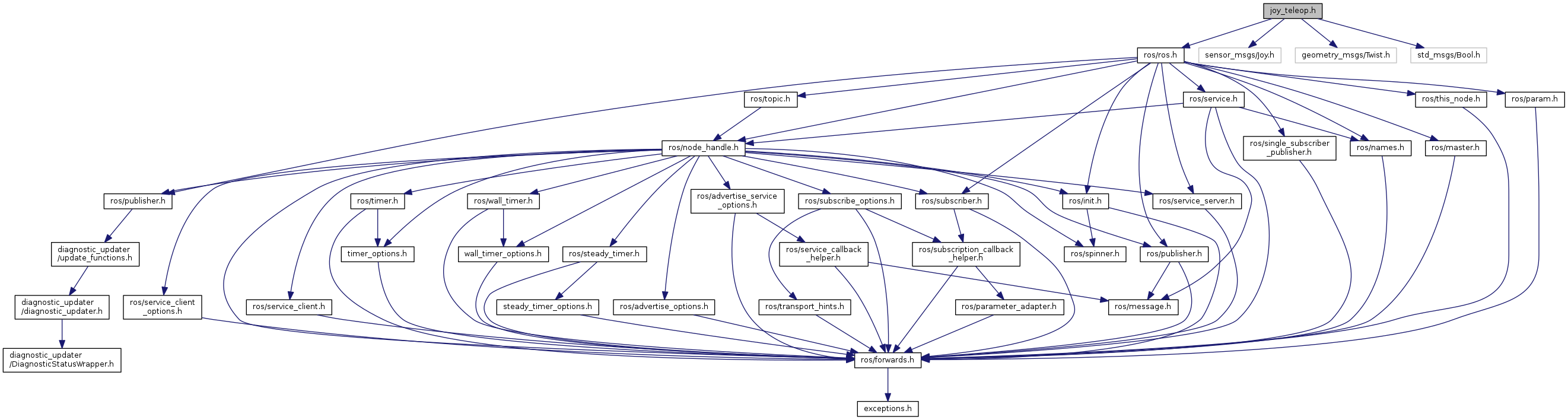
#include <ros/ros.h>#include <sensor_msgs/Joy.h>#include <geometry_msgs/Twist.h>#include <std_msgs/Bool.h>
Include dependency graph for joy_teleop.h:
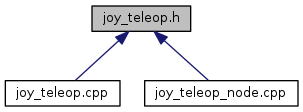
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | joy_callback (const sensor_msgs::Joy::ConstPtr &joy) |
Variables | |
| int | angular_speed_axis |
| geometry_msgs::Twist | cmd_to_send |
| ros::Publisher | cmd_vel_pub |
| bool | dead_man = false |
| int | e_stop_button |
| ros::Publisher | e_stop_pub |
| bool | e_stop_status = false |
| int | enable_button |
| int | enable_e_stop |
| ros::Subscriber | joy_subscriber |
| int | linear_speed_axis |
| double | max_angular_speed |
| double | max_linear_speed |
| int | stop_button |
Function Documentation
| void joy_callback | ( | const sensor_msgs::Joy::ConstPtr & | joy | ) |
Definition at line 32 of file joy_teleop.cpp.
Variable Documentation
| int angular_speed_axis |
Definition at line 41 of file joy_teleop.h.
| geometry_msgs::Twist cmd_to_send |
Definition at line 54 of file joy_teleop.h.
| ros::Publisher cmd_vel_pub |
Definition at line 50 of file joy_teleop.h.
| bool dead_man = false |
Definition at line 53 of file joy_teleop.h.
| int e_stop_button |
Definition at line 39 of file joy_teleop.h.
| ros::Publisher e_stop_pub |
Definition at line 51 of file joy_teleop.h.
| bool e_stop_status = false |
Definition at line 35 of file joy_teleop.h.
| int enable_button |
Definition at line 37 of file joy_teleop.h.
| int enable_e_stop |
Definition at line 43 of file joy_teleop.h.
| ros::Subscriber joy_subscriber |
Definition at line 48 of file joy_teleop.h.
| int linear_speed_axis |
Definition at line 40 of file joy_teleop.h.
| double max_angular_speed |
Definition at line 46 of file joy_teleop.h.
| double max_linear_speed |
Definition at line 45 of file joy_teleop.h.
| int stop_button |
Definition at line 38 of file joy_teleop.h.