#include <collision_check_plugin.h>
Public Types | |
| enum | { FOOT = 1, UPPER_BODY = 2, FOOT_CONTACT_SUPPORT = 4 } |
| typedef boost::shared_ptr< const CollisionCheckPlugin > | ConstPtr |
| typedef boost::shared_ptr< CollisionCheckPlugin > | Ptr |
Public Member Functions | |
| CollisionCheckPlugin (const std::string &name) | |
| bool | initialize (const vigir_generic_params::ParameterSet ¶ms=vigir_generic_params::ParameterSet()) override |
| virtual bool | isAccessible (const State &s) const =0 |
| virtual bool | isAccessible (const State &next, const State ¤t) const =0 |
| virtual bool | isCollisionCheckAvailable () const |
| bool | isUnique () const override |
| bool | loadParams (const vigir_generic_params::ParameterSet ¶ms=vigir_generic_params::ParameterSet()) override |
| virtual void | reset () |
| Resets the plugin to initial state. More... | |
Private Attributes | |
| bool | collision_check_enabled_ |
| unsigned int | collision_check_flag_ |
Detailed Description
Definition at line 44 of file collision_check_plugin.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const CollisionCheckPlugin> vigir_footstep_planning::CollisionCheckPlugin::ConstPtr |
Definition at line 57 of file collision_check_plugin.h.
Definition at line 56 of file collision_check_plugin.h.
Member Enumeration Documentation
| anonymous enum |
| Enumerator | |
|---|---|
| FOOT | |
| UPPER_BODY | |
| FOOT_CONTACT_SUPPORT | |
Definition at line 48 of file collision_check_plugin.h.
Constructor & Destructor Documentation
| vigir_footstep_planning::CollisionCheckPlugin::CollisionCheckPlugin | ( | const std::string & | name | ) |
Definition at line 7 of file collision_check_plugin.cpp.
Member Function Documentation
|
override |
Definition at line 26 of file collision_check_plugin.cpp.
|
pure virtual |
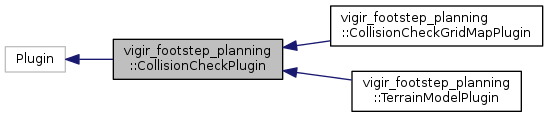
Implemented in vigir_footstep_planning::CollisionCheckGridMapPlugin.
|
pure virtual |
Implemented in vigir_footstep_planning::CollisionCheckGridMapPlugin.
|
virtual |
Reimplemented in vigir_footstep_planning::CollisionCheckGridMapPlugin.
Definition at line 45 of file collision_check_plugin.cpp.
|
override |
Definition at line 40 of file collision_check_plugin.cpp.
|
override |
Definition at line 13 of file collision_check_plugin.cpp.
|
virtual |
Resets the plugin to initial state.
Reimplemented in vigir_footstep_planning::CollisionCheckGridMapPlugin.
Definition at line 36 of file collision_check_plugin.cpp.
Member Data Documentation
|
private |
Definition at line 77 of file collision_check_plugin.h.
|
private |
Definition at line 78 of file collision_check_plugin.h.
The documentation for this class was generated from the following files: