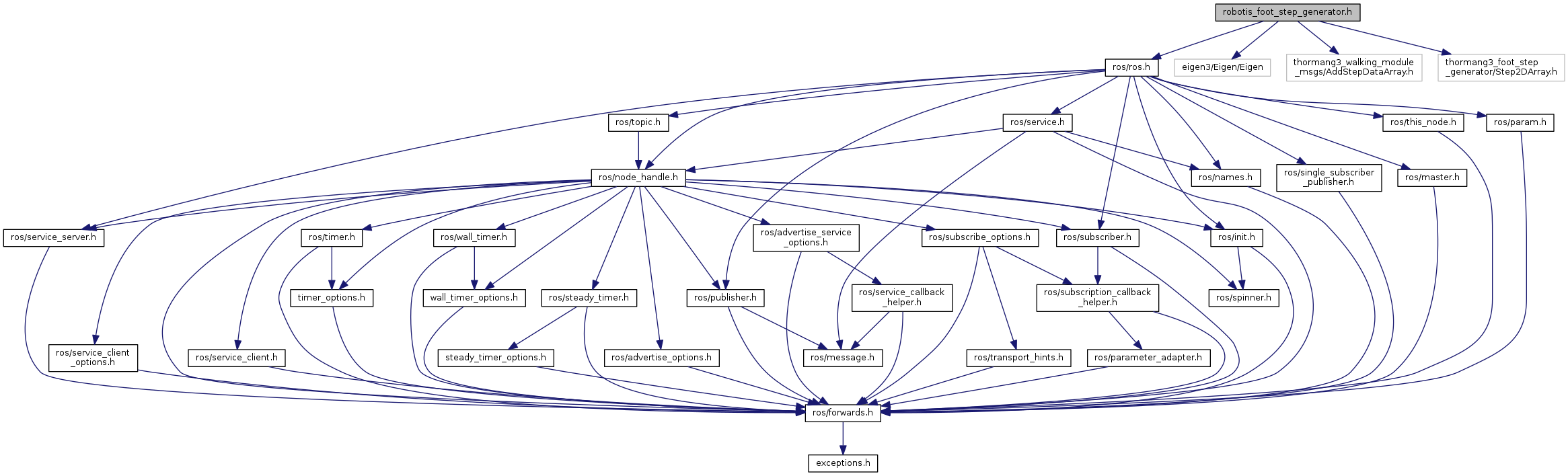
#include <ros/ros.h>#include <eigen3/Eigen/Eigen>#include "thormang3_walking_module_msgs/AddStepDataArray.h"#include "thormang3_foot_step_generator/Step2DArray.h"
Include dependency graph for robotis_foot_step_generator.h:
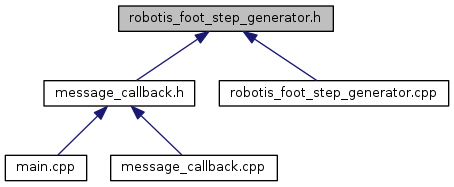
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | thormang3::FootStepGenerator |
Namespaces | |
| thormang3 | |
Macros | |
| #define | BACKWARD_WALKING (2) |
| #define | FORWARD_WALKING (1) |
| #define | LEFT_ROTATING_WALKING (5) |
| #define | LEFTWARD_WALKING (4) |
| #define | MINIMUM_STEP_TIME_SEC (0.4) |
| #define | RIGHT_ROTATING_WALKING (6) |
| #define | RIGHTWARD_WALKING (3) |
| #define | STOP_WALKING (0) |
Macro Definition Documentation
| #define BACKWARD_WALKING (2) |
Definition at line 34 of file robotis_foot_step_generator.h.
| #define FORWARD_WALKING (1) |
Definition at line 33 of file robotis_foot_step_generator.h.
| #define LEFT_ROTATING_WALKING (5) |
Definition at line 37 of file robotis_foot_step_generator.h.
| #define LEFTWARD_WALKING (4) |
Definition at line 36 of file robotis_foot_step_generator.h.
| #define MINIMUM_STEP_TIME_SEC (0.4) |
Definition at line 40 of file robotis_foot_step_generator.h.
| #define RIGHT_ROTATING_WALKING (6) |
Definition at line 38 of file robotis_foot_step_generator.h.
| #define RIGHTWARD_WALKING (3) |
Definition at line 35 of file robotis_foot_step_generator.h.
| #define STOP_WALKING (0) |
Definition at line 32 of file robotis_foot_step_generator.h.