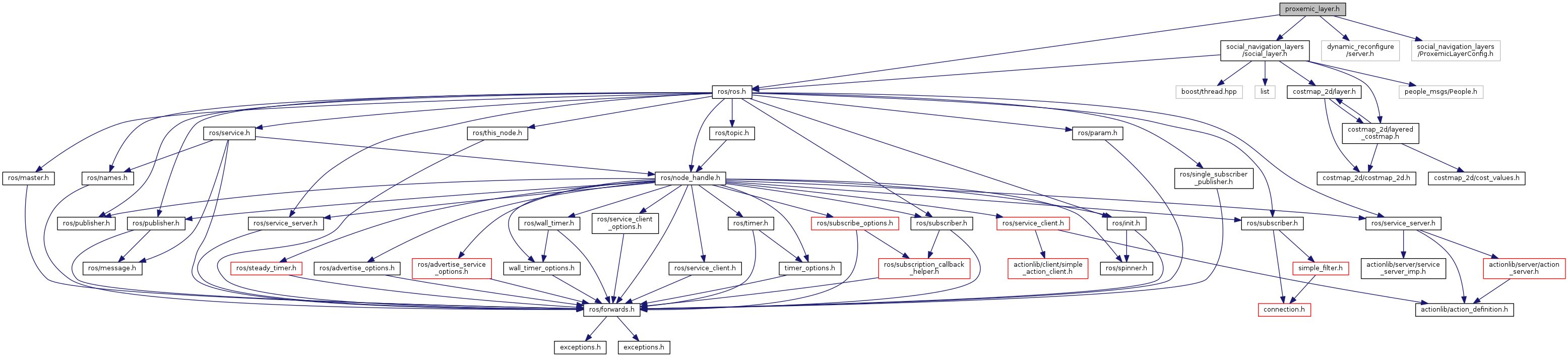
#include <ros/ros.h>#include <social_navigation_layers/social_layer.h>#include <dynamic_reconfigure/server.h>#include <social_navigation_layers/ProxemicLayerConfig.h>
Include dependency graph for proxemic_layer.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | social_navigation_layers::ProxemicLayer |
Namespaces | |
| social_navigation_layers | |
Functions | |
| double | gaussian (double x, double y, double x0, double y0, double A, double varx, double vary, double skew) |
| double | get_radius (double cutoff, double A, double var) |
Function Documentation
| double gaussian | ( | double | x, |
| double | y, | ||
| double | x0, | ||
| double | y0, | ||
| double | A, | ||
| double | varx, | ||
| double | vary, | ||
| double | skew | ||
| ) |
Definition at line 14 of file proxemic_layer.cpp.
| double get_radius | ( | double | cutoff, |
| double | A, | ||
| double | var | ||
| ) |
Definition at line 26 of file proxemic_layer.cpp.