#include "test_board.h"#include "rosflight.h"#include <turbomath/turbomath.h>#include <eigen3/Eigen/Core>#include <eigen3/Eigen/Dense>#include <eigen3/Eigen/Geometry>#include <gtest/gtest.h>#include <cstdint>
Include dependency graph for test/common.h:
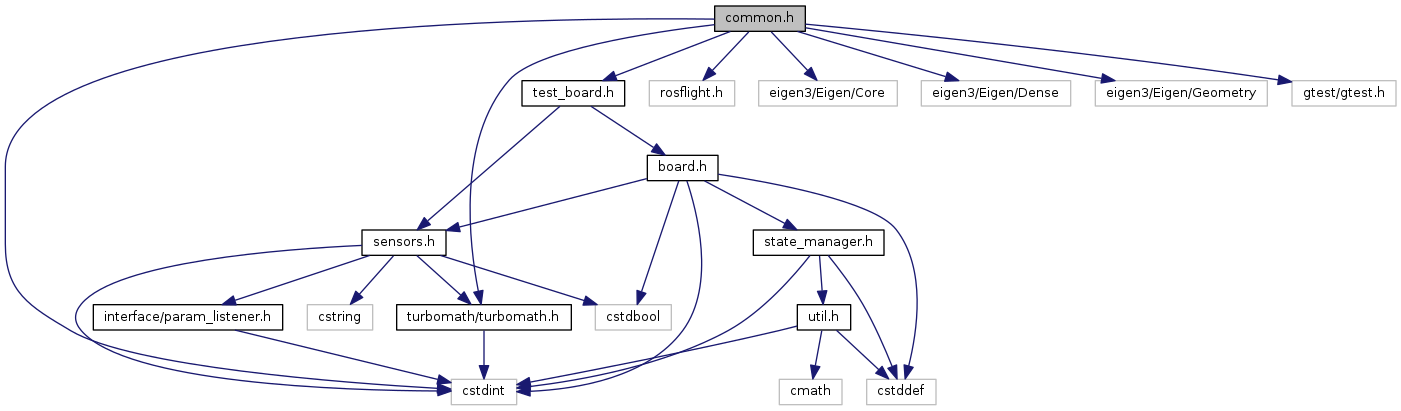
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Macros | |
| #define | ASSERT_BASICALLYTHESAME(x, y) ASSERT_NEAR(x, y, 0.00001) |
| #define | ASSERT_CLOSE(x, y) ASSERT_NEAR(x, y, 0.01) |
| #define | ASSERT_INTHESAMEBALLPARK(x, y) ASSERT_NEAR(x, y, 0.1) |
| #define | ASSERT_QUAT_SUPERCLOSE(q, q_eig) |
| #define | ASSERT_SUPERCLOSE(x, y) ASSERT_NEAR(x, y, 0.0001) |
| #define | ASSERT_TURBOQUAT_SUPERCLOSE(q, q2) |
| #define | EXPECT_BASICALLYTHESAME(x, y) EXPECT_NEAR(x, y, 0.00001) |
| #define | EXPECT_CLOSE(x, y) EXPECT_NEAR(x, y, 0.01) |
| #define | EXPECT_INTHESAMEBALLPARK(x, y) EXPECT_NEAR(x, y, 0.1) |
| #define | EXPECT_QUAT_SUPERCLOSE(q, q_eig) |
| #define | EXPECT_SUPERCLOSE(x, y) EXPECT_NEAR(x, y, 0.0001) |
| #define | EXPECT_VEC3_SUPERCLOSE(vec, eig) |
Functions | |
| double | quaternion_error (turbomath::Quaternion q0, turbomath::Quaternion q) |
| double | quaternion_error (Eigen::Quaternionf q_eig, turbomath::Quaternion q) |
| void | step_firmware (rosflight_firmware::ROSflight &rf, rosflight_firmware::testBoard &board, uint32_t us) |
Macro Definition Documentation
| #define ASSERT_BASICALLYTHESAME | ( | x, | |
| y | |||
| ) | ASSERT_NEAR(x, y, 0.00001) |
Definition at line 55 of file test/common.h.
| #define ASSERT_CLOSE | ( | x, | |
| y | |||
| ) | ASSERT_NEAR(x, y, 0.01) |
Definition at line 57 of file test/common.h.
| #define ASSERT_INTHESAMEBALLPARK | ( | x, | |
| y | |||
| ) | ASSERT_NEAR(x, y, 0.1) |
Definition at line 58 of file test/common.h.
| #define ASSERT_QUAT_SUPERCLOSE | ( | q, | |
| q_eig | |||
| ) |
Value:
{ \
double e1 = quaternion_error((q_eig), (q)); \
Eigen::Quaternionf q_eig_neg = q_eig; \
q_eig_neg.coeffs() *= -1.0; \
double e2 = quaternion_error(q_eig_neg, (q)); \
double error = (e1 < e2) ? e1 : e2; \
EXPECT_LE(error, 0.0001); \
}
double quaternion_error(turbomath::Quaternion q0, turbomath::Quaternion q)
Definition: common.cpp:16
Definition at line 27 of file test/common.h.
| #define ASSERT_SUPERCLOSE | ( | x, | |
| y | |||
| ) | ASSERT_NEAR(x, y, 0.0001) |
Definition at line 56 of file test/common.h.
| #define ASSERT_TURBOQUAT_SUPERCLOSE | ( | q, | |
| q2 | |||
| ) |
Value:
{ \
double e1 = quaternion_error(q, q2); \
turbomath::Quaternion q2_neg = q2; \
q2_neg.w *= -1.0; \
q2_neg.x *= -1.0; \
q2_neg.y *= -1.0; \
q2_neg.z *= -1.0; \
double e2 = quaternion_error(q, q2_neg); \
double error = (e1 < e2) ? e1 : e2; \
ASSERT_LE(error, 0.0001); \
}
double quaternion_error(turbomath::Quaternion q0, turbomath::Quaternion q)
Definition: common.cpp:16
Definition at line 37 of file test/common.h.
| #define EXPECT_BASICALLYTHESAME | ( | x, | |
| y | |||
| ) | EXPECT_NEAR(x, y, 0.00001) |
Definition at line 50 of file test/common.h.
| #define EXPECT_CLOSE | ( | x, | |
| y | |||
| ) | EXPECT_NEAR(x, y, 0.01) |
Definition at line 52 of file test/common.h.
| #define EXPECT_INTHESAMEBALLPARK | ( | x, | |
| y | |||
| ) | EXPECT_NEAR(x, y, 0.1) |
Definition at line 53 of file test/common.h.
| #define EXPECT_QUAT_SUPERCLOSE | ( | q, | |
| q_eig | |||
| ) |
Value:
{ \
double e1 = quaternion_error((q_eig), (q)); \
Eigen::Quaternionf q_eig_neg = q_eig; \
q_eig_neg.coeffs() *= -1.0; \
double e2 = quaternion_error(q_eig_neg, (q)); \
double error = (e1 < e2) ? e1 : e2; \
EXPECT_LE(error, 0.0001); \
}
double quaternion_error(turbomath::Quaternion q0, turbomath::Quaternion q)
Definition: common.cpp:16
Definition at line 18 of file test/common.h.
| #define EXPECT_SUPERCLOSE | ( | x, | |
| y | |||
| ) | EXPECT_NEAR(x, y, 0.0001) |
Definition at line 51 of file test/common.h.
| #define EXPECT_VEC3_SUPERCLOSE | ( | vec, | |
| eig | |||
| ) |
Value:
EXPECT_NEAR((vec).x, (eig).x(), 0.0001); \
EXPECT_NEAR((vec).y, (eig).y(), 0.0001); \
EXPECT_NEAR((vec).z, (eig).z(), 0.0001)
Definition at line 14 of file test/common.h.
Function Documentation
| double quaternion_error | ( | turbomath::Quaternion | q0, |
| turbomath::Quaternion | q | ||
| ) |
Definition at line 16 of file common.cpp.
| double quaternion_error | ( | Eigen::Quaternionf | q_eig, |
| turbomath::Quaternion | q | ||
| ) |
Definition at line 3 of file common.cpp.
| void step_firmware | ( | rosflight_firmware::ROSflight & | rf, |
| rosflight_firmware::testBoard & | board, | ||
| uint32_t | us | ||
| ) |
Definition at line 30 of file common.cpp.