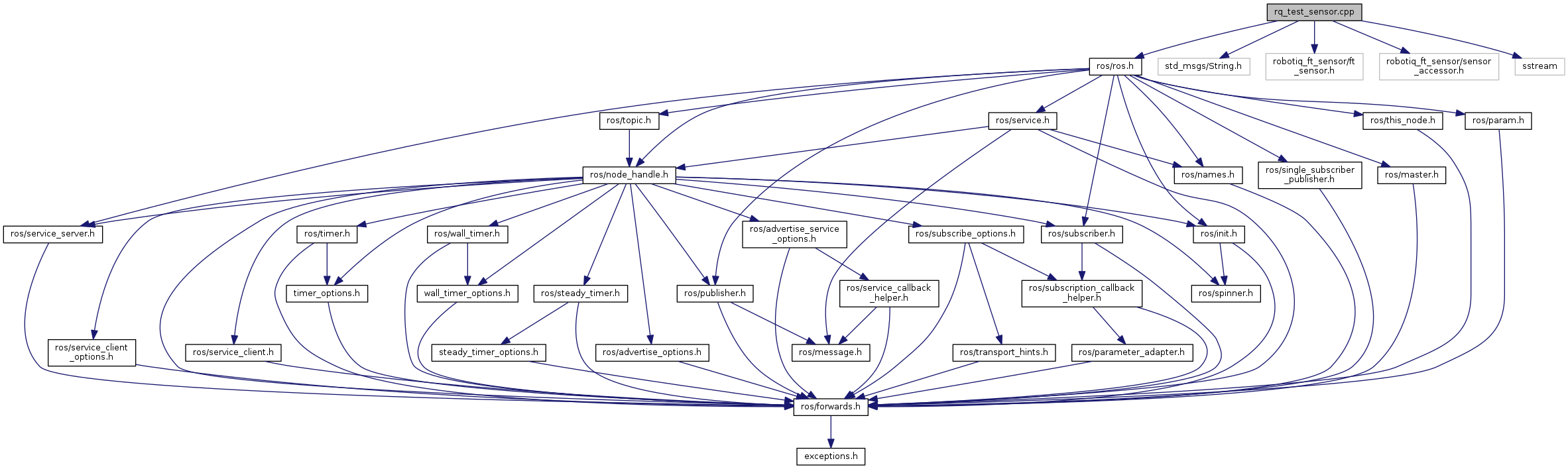
#include "ros/ros.h"#include "std_msgs/String.h"#include "robotiq_ft_sensor/ft_sensor.h"#include "robotiq_ft_sensor/sensor_accessor.h"#include <sstream>
Include dependency graph for rq_test_sensor.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| void | reCallback (const robotiq_ft_sensor::ft_sensor &msg) |
Detailed Description
- Date
- July 14, 2014
Definition in file rq_test_sensor.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
This tutorial demonstrates simple sending of messages over the ROS system.
Deprecated Interface
New Interface with numerical commands
Definition at line 63 of file rq_test_sensor.cpp.
| void reCallback | ( | const robotiq_ft_sensor::ft_sensor & | msg | ) |
Definition at line 55 of file rq_test_sensor.cpp.