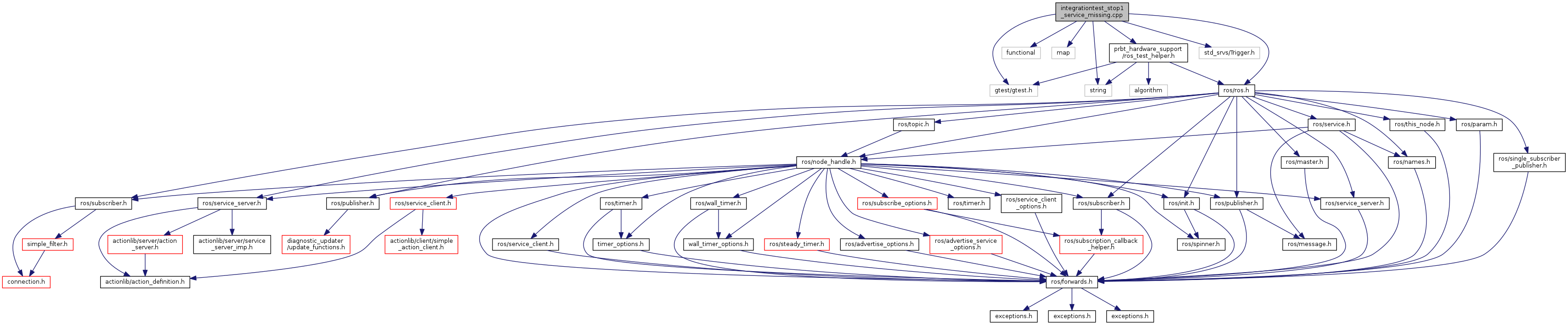
#include <gtest/gtest.h>#include <functional>#include <map>#include <string>#include <ros/ros.h>#include <std_srvs/Trigger.h>#include <prbt_hardware_support/ros_test_helper.h>
Include dependency graph for integrationtest_stop1_service_missing.cpp:
Go to the source code of this file.
Classes | |
| class | prbt_hardware_support::Stop1ServiceMissingIntegrationTest |
| Test the stop1 startup with a missing service. More... | |
Namespaces | |
| prbt_hardware_support | |
Functions | |
| int | main (int argc, char *argv[]) |
| prbt_hardware_support::TEST_F (Stop1ServiceMissingIntegrationTest, testMissingService) | |
| Test that the startup of the stop1_executor is not complete if a service is missing. More... | |
| bool | prbt_hardware_support::triggerCallbackDummy (std_srvs::TriggerRequest &req, std_srvs::TriggerResponse &resp) |
Variables | |
| static const std::string | prbt_hardware_support::HALT_SERVICE_NAME {"halt"} |
| static const std::string | prbt_hardware_support::HOLD_SERVICE_NAME {"hold"} |
| static const std::string | prbt_hardware_support::OMIT_SERVICE_PARAM_NAME {"omit_service"} |
| static const std::string | prbt_hardware_support::RECOVER_SERVICE_NAME {"recover"} |
| static const std::string | prbt_hardware_support::STOP1_EXECUTOR_NODE_NAME {"/stop1_executor_node"} |
| static const std::string | prbt_hardware_support::UNHOLD_SERVICE_NAME {"unhold"} |
| static constexpr double | prbt_hardware_support::WAIT_FOR_NODE_SLEEPTIME_S {5.0} |
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 137 of file integrationtest_stop1_service_missing.cpp.