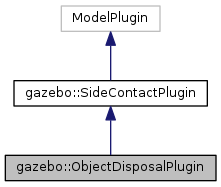
A plugin for a contact sensor attached to a model disposal unit. More...
#include <ObjectDisposalPlugin.hh>
Public Member Functions | |
| virtual void | Load (physics::ModelPtr _model, sdf::ElementPtr _sdf) |
| Load the model plugin. More... | |
| ObjectDisposalPlugin () | |
| Constructor. More... | |
| virtual | ~ObjectDisposalPlugin () |
| Destructor. More... | |
 Public Member Functions inherited from gazebo::SideContactPlugin Public Member Functions inherited from gazebo::SideContactPlugin | |
| SideContactPlugin () | |
| Constructor. More... | |
| virtual | ~SideContactPlugin () |
| Destructor. More... | |
Protected Member Functions | |
| void | ActOnContactingModels () |
| Act on models that are ontop of the sensor's link. More... | |
| void | OnUpdate (const common::UpdateInfo &_info) |
| Callback that receives the world update event. More... | |
| Protected Member Functions inherited from gazebo::SideContactPlugin | |
| virtual void | CalculateContactingLinks () |
| Determine which links are in contact with the side of the parent link. More... | |
| virtual void | CalculateContactingModels () |
| Determine which models are in contact with the side of the parent link. More... | |
| bool | FindContactSensor () |
| Iterate through links of model to find sensor with the specified name. More... | |
| virtual void | OnContactsReceived (ConstContactsPtr &_msg) |
| Callback that recieves the contact sensor's messages. More... | |
Protected Attributes | |
| bool | centerOfGravityCheck |
| If true, only delete models if their CoG is within the bounding box of the link. More... | |
| Protected Attributes inherited from gazebo::SideContactPlugin | |
| std::string | collisionName |
| Name of the collision of the parent's link. More... | |
| std::set< physics::LinkPtr > | contactingLinks |
| Set of pointers to links that have collisions with the parent link's side. More... | |
| std::set< physics::ModelPtr > | contactingModels |
| Set of pointers to models that have collisions with the parent link's side. More... | |
| std::string | contactSensorName |
| Name of the contact sensor. More... | |
| transport::SubscriberPtr | contactSub |
| Subscriber for the contact topic. More... | |
| physics::ModelPtr | model |
| Pointer to the model. More... | |
| boost::mutex | mutex |
| Mutex for protecting contacts msg. More... | |
| msgs::Contacts | newestContactsMsg |
| Contacts msg received. More... | |
| bool | newMsg |
| Flag for new contacts message. More... | |
| transport::NodePtr | node |
| Pointer to this node for publishing/subscribing. More... | |
| physics::LinkPtr | parentLink |
| Pointer to the sensor's parent's link. More... | |
| sensors::ContactSensorPtr | parentSensor |
| Pointer to the contact sensor. More... | |
| std::string | scopedContactSensorName |
| Scoped name of the contact sensor. More... | |
| ignition::math::Vector3d | sideNormal |
| The normal, in local frame, to the side that is to have contacts monitored (default (0, 0, 1)) More... | |
| event::ConnectionPtr | updateConnection |
| Pointer to the update event connection. More... | |
| physics::WorldPtr | world |
| Pointer to the world. More... | |
Detailed Description
A plugin for a contact sensor attached to a model disposal unit.
Definition at line 34 of file ObjectDisposalPlugin.hh.
Constructor & Destructor Documentation
| ObjectDisposalPlugin::ObjectDisposalPlugin | ( | ) |
Constructor.
Definition at line 28 of file ObjectDisposalPlugin.cc.
|
virtual |
Destructor.
Definition at line 33 of file ObjectDisposalPlugin.cc.
Member Function Documentation
|
protected |
Act on models that are ontop of the sensor's link.
Definition at line 59 of file ObjectDisposalPlugin.cc.
|
virtual |
Load the model plugin.
- Parameters
-
[in] _model Pointer to the model that loaded this plugin. [in] _sdf SDF element that describes the plugin.
Reimplemented from gazebo::SideContactPlugin.
Definition at line 41 of file ObjectDisposalPlugin.cc.
|
protectedvirtual |
Callback that receives the world update event.
Reimplemented from gazebo::SideContactPlugin.
Definition at line 52 of file ObjectDisposalPlugin.cc.
Member Data Documentation
|
protected |
If true, only delete models if their CoG is within the bounding box of the link.
Definition at line 54 of file ObjectDisposalPlugin.hh.
The documentation for this class was generated from the following files: