#include <b2Joint.h>
Public Member Functions | |
| virtual void | Dump () |
| Dump this joint to the log file. More... | |
| virtual b2Vec2 | GetAnchorA () const =0 |
| Get the anchor point on bodyA in world coordinates. More... | |
| virtual b2Vec2 | GetAnchorB () const =0 |
| Get the anchor point on bodyB in world coordinates. More... | |
| b2Body * | GetBodyA () |
| Get the first body attached to this joint. More... | |
| b2Body * | GetBodyB () |
| Get the second body attached to this joint. More... | |
| bool | GetCollideConnected () const |
| b2Joint * | GetNext () |
| Get the next joint the world joint list. More... | |
| const b2Joint * | GetNext () const |
| virtual b2Vec2 | GetReactionForce (float32 inv_dt) const =0 |
| Get the reaction force on bodyB at the joint anchor in Newtons. More... | |
| virtual float32 | GetReactionTorque (float32 inv_dt) const =0 |
| Get the reaction torque on bodyB in N*m. More... | |
| b2JointType | GetType () const |
| Get the type of the concrete joint. More... | |
| void * | GetUserData () const |
| Get the user data pointer. More... | |
| bool | IsActive () const |
| Short-cut function to determine if either body is inactive. More... | |
| void | SetUserData (void *data) |
| Set the user data pointer. More... | |
| virtual void | ShiftOrigin (const b2Vec2 &newOrigin) |
| Shift the origin for any points stored in world coordinates. More... | |
Protected Member Functions | |
| b2Joint (const b2JointDef *def) | |
| virtual void | InitVelocityConstraints (const b2SolverData &data)=0 |
| virtual bool | SolvePositionConstraints (const b2SolverData &data)=0 |
| virtual void | SolveVelocityConstraints (const b2SolverData &data)=0 |
| virtual | ~b2Joint () |
Static Protected Member Functions | |
| static b2Joint * | Create (const b2JointDef *def, b2BlockAllocator *allocator) |
| static void | Destroy (b2Joint *joint, b2BlockAllocator *allocator) |
Protected Attributes | |
| b2Body * | m_bodyA |
| b2Body * | m_bodyB |
| bool | m_collideConnected |
| b2JointEdge | m_edgeA |
| b2JointEdge | m_edgeB |
| int32 | m_index |
| bool | m_islandFlag |
| b2Joint * | m_next |
| b2Joint * | m_prev |
| b2JointType | m_type |
| void * | m_userData |
Friends | |
| class | b2Body |
| class | b2GearJoint |
| class | b2Island |
| class | b2World |
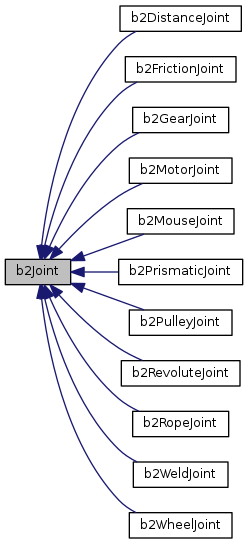
Detailed Description
The base joint class. Joints are used to constraint two bodies together in various fashions. Some joints also feature limits and motors.
Constructor & Destructor Documentation
|
protected |
Definition at line 183 of file b2Joint.cpp.
Member Function Documentation
|
staticprotected |
Definition at line 37 of file b2Joint.cpp.
|
staticprotected |
Definition at line 128 of file b2Joint.cpp.
|
inlinevirtual |
Dump this joint to the log file.
Reimplemented in b2RevoluteJoint, b2PrismaticJoint, b2WheelJoint, b2PulleyJoint, b2DistanceJoint, b2MotorJoint, b2MouseJoint, b2WeldJoint, b2FrictionJoint, b2RopeJoint, and b2GearJoint.
|
pure virtual |
Get the anchor point on bodyA in world coordinates.
Implemented in b2RevoluteJoint, b2PrismaticJoint, b2PulleyJoint, b2WheelJoint, b2DistanceJoint, b2MouseJoint, b2WeldJoint, b2MotorJoint, b2RopeJoint, b2GearJoint, and b2FrictionJoint.
|
pure virtual |
Get the anchor point on bodyB in world coordinates.
Implemented in b2RevoluteJoint, b2PrismaticJoint, b2PulleyJoint, b2WheelJoint, b2DistanceJoint, b2MouseJoint, b2WeldJoint, b2MotorJoint, b2RopeJoint, b2GearJoint, and b2FrictionJoint.
|
inline |
|
inline |
|
inline |
|
inline |
Get the reaction force on bodyB at the joint anchor in Newtons.
Implemented in b2RevoluteJoint, b2PrismaticJoint, b2PulleyJoint, b2WheelJoint, b2DistanceJoint, b2MouseJoint, b2WeldJoint, b2MotorJoint, b2RopeJoint, b2GearJoint, and b2FrictionJoint.
Get the reaction torque on bodyB in N*m.
Implemented in b2RevoluteJoint, b2PrismaticJoint, b2PulleyJoint, b2WheelJoint, b2DistanceJoint, b2MouseJoint, b2WeldJoint, b2MotorJoint, b2RopeJoint, b2GearJoint, and b2FrictionJoint.
|
inline |
|
inline |
|
protectedpure virtual |
Implemented in b2RevoluteJoint, b2PrismaticJoint, b2WheelJoint, b2PulleyJoint, b2DistanceJoint, b2MotorJoint, b2MouseJoint, b2WeldJoint, b2FrictionJoint, b2RopeJoint, and b2GearJoint.
| bool b2Joint::IsActive | ( | ) | const |
Short-cut function to determine if either body is inactive.
Definition at line 208 of file b2Joint.cpp.
Shift the origin for any points stored in world coordinates.
Reimplemented in b2PulleyJoint, and b2MouseJoint.
|
protectedpure virtual |
Implemented in b2RevoluteJoint, b2PrismaticJoint, b2WheelJoint, b2PulleyJoint, b2DistanceJoint, b2MotorJoint, b2MouseJoint, b2WeldJoint, b2FrictionJoint, b2RopeJoint, and b2GearJoint.
|
protectedpure virtual |
Implemented in b2RevoluteJoint, b2PrismaticJoint, b2WheelJoint, b2PulleyJoint, b2DistanceJoint, b2MotorJoint, b2MouseJoint, b2WeldJoint, b2FrictionJoint, b2RopeJoint, and b2GearJoint.
Friends And Related Function Documentation
|
friend |
Member Data Documentation
|
protected |
|
protected |
|
protected |
The documentation for this class was generated from the following files: