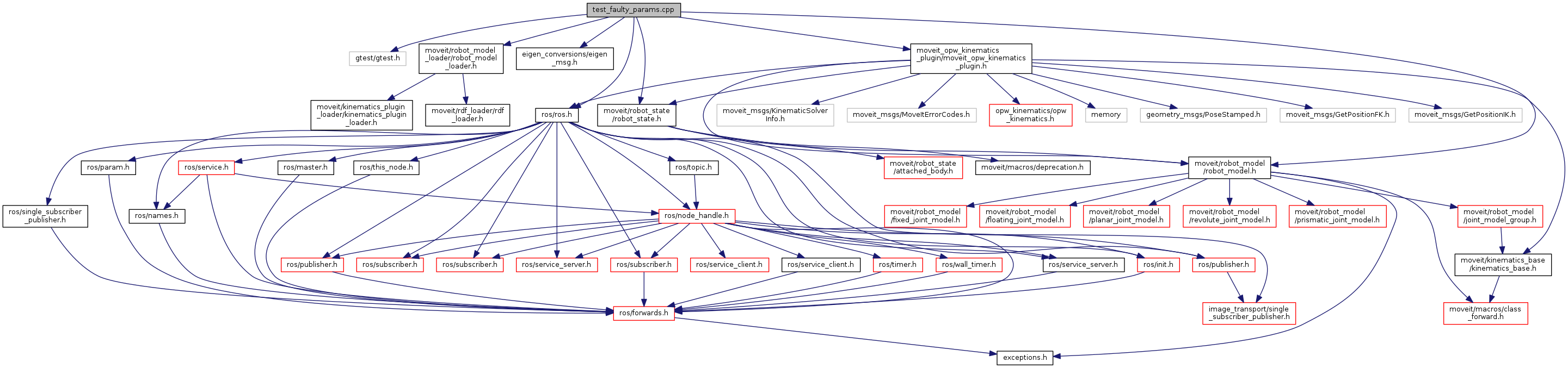
#include <gtest/gtest.h>#include <ros/ros.h>#include <eigen_conversions/eigen_msg.h>#include <moveit/robot_model_loader/robot_model_loader.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_state/robot_state.h>#include <moveit_opw_kinematics_plugin/moveit_opw_kinematics_plugin.h>
Include dependency graph for test_faulty_params.cpp:
Go to the source code of this file.
Classes | |
| class | TestPlugin |
Functions | |
| int | main (int argc, char **argv) |
| TEST_F (TestPlugin, InitFaulty) | |
Variables | |
| const std::string | GROUP_PARAM = "group" |
| const std::string | ROBOT_DESCRIPTION = "robot_description" |
| const std::string | ROOT_LINK_PARAM = "root_link" |
| const std::string | TIP_LINK_PARAM = "tip_link" |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 58 of file test_faulty_params.cpp.
| TEST_F | ( | TestPlugin | , |
| InitFaulty | |||
| ) |
Initialize plugin when the kinematic parameters loaded are incorrect.
Therefore initialize should return false. Notice we do not check explicitly why it fails, but we assumed that it fails because the faulty parameters where loaded by the rostest launch file.
Definition at line 51 of file test_faulty_params.cpp.
Variable Documentation
| const std::string GROUP_PARAM = "group" |
Definition at line 11 of file test_faulty_params.cpp.
| const std::string ROBOT_DESCRIPTION = "robot_description" |
Definition at line 16 of file test_faulty_params.cpp.
| const std::string ROOT_LINK_PARAM = "root_link" |
Definition at line 13 of file test_faulty_params.cpp.
| const std::string TIP_LINK_PARAM = "tip_link" |
Definition at line 12 of file test_faulty_params.cpp.