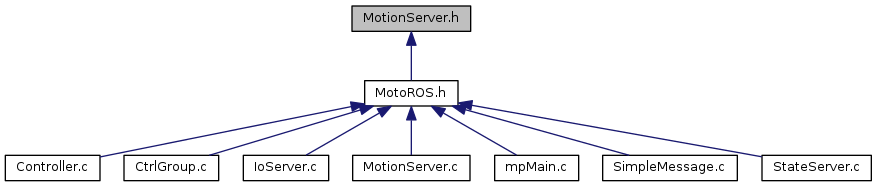
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Macros | |
| #define | MAX_TRAJECTORY_TIME_LENGTH 14400.0f |
| #define | MAX_VALID_TOOL_INDEX 63 |
| #define | MIN_VALID_TOOL_INDEX 0 |
| #define | MOTION_INIT_ROS_JOB "INIT_ROS" |
| #define | MOTION_START_CHECK_PERIOD 50 |
| #define | MOTION_START_TIMEOUT 5000 |
| #define | MOTION_STOP_TIMEOUT 20 |
Functions | |
| BOOL | Ros_MotionServer_ClearQ_All (Controller *controller) |
| BOOL | Ros_MotionServer_HasDataInQueue (Controller *controller) |
| void | Ros_MotionServer_StartNewConnection (Controller *controller, int sd) |
Macro Definition Documentation
| #define MAX_TRAJECTORY_TIME_LENGTH 14400.0f |
Definition at line 40 of file MotionServer.h.
| #define MAX_VALID_TOOL_INDEX 63 |
Definition at line 43 of file MotionServer.h.
| #define MIN_VALID_TOOL_INDEX 0 |
Definition at line 42 of file MotionServer.h.
| #define MOTION_INIT_ROS_JOB "INIT_ROS" |
Definition at line 38 of file MotionServer.h.
| #define MOTION_START_CHECK_PERIOD 50 |
Definition at line 37 of file MotionServer.h.
| #define MOTION_START_TIMEOUT 5000 |
Definition at line 36 of file MotionServer.h.
| #define MOTION_STOP_TIMEOUT 20 |
Definition at line 35 of file MotionServer.h.
Function Documentation
| BOOL Ros_MotionServer_ClearQ_All | ( | Controller * | controller | ) |
Definition at line 1562 of file MotionServer.c.
| BOOL Ros_MotionServer_HasDataInQueue | ( | Controller * | controller | ) |
Definition at line 1611 of file MotionServer.c.
| void Ros_MotionServer_StartNewConnection | ( | Controller * | controller, |
| int | sd | ||
| ) |
Definition at line 82 of file MotionServer.c.