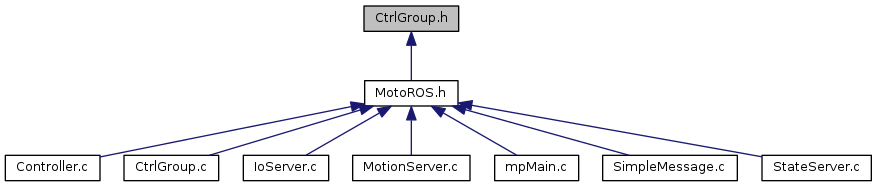
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | CtrlGroup |
| struct | Incremental_data |
| struct | Incremental_q |
| struct | JointMotionData |
Macros | |
| #define | Q_LOCK_TIMEOUT 5000 |
| #define | Q_OFFSET_IDX(a, b, c) |
| #define | Q_SIZE 200 |
| #define | RAD_PER_DEGREE (0.0174533) |
Functions | |
| void | Ros_CtrlGroup_ConvertToMotoPos (CtrlGroup *ctrlGroup, float radPos[MAX_PULSE_AXES], long pulsePos[MAX_PULSE_AXES]) |
| void | Ros_CtrlGroup_ConvertToRosPos (CtrlGroup *ctrlGroup, long pulsePos[MAX_PULSE_AXES], float rosPos[MAX_PULSE_AXES]) |
| CtrlGroup * | Ros_CtrlGroup_Create (int groupNo, BOOL bIsLastGrpToInit, float interpolPeriod) |
| UCHAR | Ros_CtrlGroup_GetAxisConfig (CtrlGroup *ctrlGroup) |
| BOOL | Ros_CtrlGroup_GetFBPulsePos (CtrlGroup *ctrlGroup, long pulsePos[MAX_PULSE_AXES]) |
| BOOL | Ros_CtrlGroup_GetFBServoSpeed (CtrlGroup *ctrlGroup, long pulseSpeed[MAX_PULSE_AXES]) |
| BOOL | Ros_CtrlGroup_GetPulsePosCmd (CtrlGroup *ctrlGroup, long pulsePos[MAX_PULSE_AXES]) |
| BOOL | Ros_CtrlGroup_GetTorque (CtrlGroup *ctrlGroup, double torqueValues[MAX_PULSE_AXES]) |
| BOOL | Ros_CtrlGroup_IsRobot (CtrlGroup *ctrlGroup) |
Macro Definition Documentation
| #define Q_LOCK_TIMEOUT 5000 |
Definition at line 41 of file CtrlGroup.h.
| #define Q_OFFSET_IDX | ( | a, | |
| b, | |||
| c | |||
| ) |
Value:
(((a)+(b)) >= (c) ) ? ((a)+(b)-(c)) \
: ( (((a)+(b)) < 0 ) ? ((a)+(b)+(c)) : ((a)+(b)) )
Definition at line 44 of file CtrlGroup.h.
| #define Q_SIZE 200 |
Definition at line 36 of file CtrlGroup.h.
| #define RAD_PER_DEGREE (0.0174533) |
Definition at line 47 of file CtrlGroup.h.
Function Documentation
| void Ros_CtrlGroup_ConvertToMotoPos | ( | CtrlGroup * | ctrlGroup, |
| float | radPos[MAX_PULSE_AXES], | ||
| long | pulsePos[MAX_PULSE_AXES] | ||
| ) |
Definition at line 548 of file CtrlGroup.c.
| void Ros_CtrlGroup_ConvertToRosPos | ( | CtrlGroup * | ctrlGroup, |
| long | pulsePos[MAX_PULSE_AXES], | ||
| float | rosPos[MAX_PULSE_AXES] | ||
| ) |
Definition at line 479 of file CtrlGroup.c.
| CtrlGroup* Ros_CtrlGroup_Create | ( | int | groupNo, |
| BOOL | bIsLastGrpToInit, | ||
| float | interpolPeriod | ||
| ) |
Definition at line 59 of file CtrlGroup.c.
| UCHAR Ros_CtrlGroup_GetAxisConfig | ( | CtrlGroup * | ctrlGroup | ) |
Definition at line 618 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_GetFBPulsePos | ( | CtrlGroup * | ctrlGroup, |
| long | pulsePos[MAX_PULSE_AXES] | ||
| ) |
Definition at line 271 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_GetFBServoSpeed | ( | CtrlGroup * | ctrlGroup, |
| long | pulseSpeed[MAX_PULSE_AXES] | ||
| ) |
Definition at line 345 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_GetPulsePosCmd | ( | CtrlGroup * | ctrlGroup, |
| long | pulsePos[MAX_PULSE_AXES] | ||
| ) |
Definition at line 212 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_GetTorque | ( | CtrlGroup * | ctrlGroup, |
| double | torqueValues[MAX_PULSE_AXES] | ||
| ) |
Definition at line 450 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_IsRobot | ( | CtrlGroup * | ctrlGroup | ) |
Definition at line 635 of file CtrlGroup.c.