#include <gtest/gtest.h>#include "filters.hpp"#include "grid_map_core/grid_map_core.hpp"#include <filters/filter_chain.h>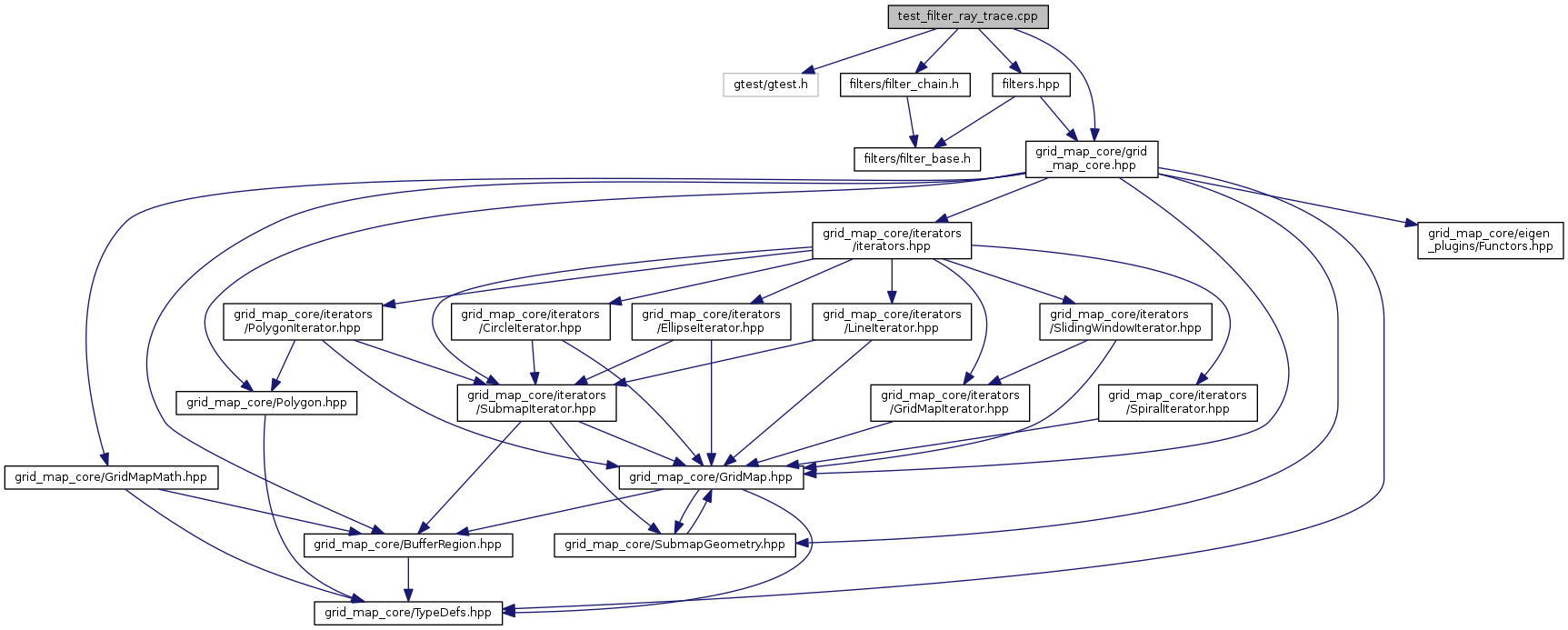
Go to the source code of this file.
Macros | |
| #define | GTEST_COUT std::cerr << "[ INFO ] " |
Functions | |
| TEST (RayTrace, active) | |
| TEST (RayTrace, layers_dont_exist) | |
| TEST (RayTrace, fully_open) | |
| TEST (RayTrace, front_blocked) | |
| TEST (RayTrace, stress_test) | |
Macro Definition Documentation
| #define GTEST_COUT std::cerr << "[ INFO ] " |
Definition at line 6 of file test_filter_ray_trace.cpp.
Function Documentation
| TEST | ( | RayTrace | , |
| active | |||
| ) |
Definition at line 8 of file test_filter_ray_trace.cpp.
| TEST | ( | RayTrace | , |
| layers_dont_exist | |||
| ) |
Test that error checking works for cases in which the ground and nonground layers don't exist.
Definition at line 17 of file test_filter_ray_trace.cpp.
| TEST | ( | RayTrace | , |
| fully_open | |||
| ) |
Say all squares are open u = unknown 0 = clear 100 = occupied Nonground [c], [c], [c], [c], [c], [c], [c], [c], [c],
Ground [u], [u], [u], [u], [u], [u], [u], [u], [u]
Definition at line 60 of file test_filter_ray_trace.cpp.
| TEST | ( | RayTrace | , |
| front_blocked | |||
| ) |
Say all squares are open u = unknown c = clear o = occupied
Nonground [c], [c], [c], [c], [c], [c], [o], [o], [o], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c]
Ground [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u], [u]
Expected Occupancy Output [u], [u], [u], [u], [u], [u], [o], [o], [o], [u], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c], [c]
Definition at line 122 of file test_filter_ray_trace.cpp.
| TEST | ( | RayTrace | , |
| stress_test | |||
| ) |
Definition at line 182 of file test_filter_ray_trace.cpp.