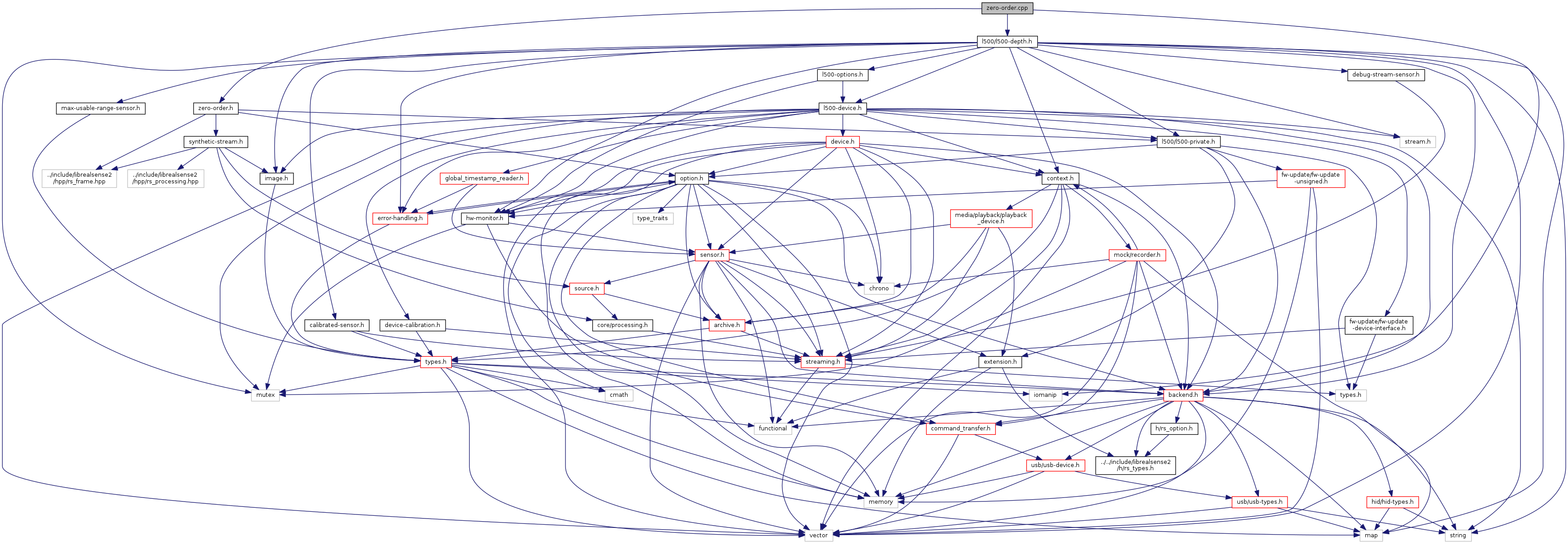
Include dependency graph for zero-order.cpp:
Go to the source code of this file.
Namespaces | |
| librealsense | |
Enumerations | |
| enum | librealsense::zero_order_invalidation_options { librealsense::RS2_OPTION_FILTER_ZO_IR_THRESHOLD = static_cast<rs2_option>(RS2_OPTION_COUNT + 0), librealsense::RS2_OPTION_FILTER_ZO_RTD_HIGH_THRESHOLD = static_cast<rs2_option>(RS2_OPTION_COUNT + 1), librealsense::RS2_OPTION_FILTER_ZO_RTD_LOW_THRESHOLD = static_cast<rs2_option>(RS2_OPTION_COUNT + 2), librealsense::RS2_OPTION_FILTER_ZO_BASELINE = static_cast<rs2_option>(RS2_OPTION_COUNT + 3), librealsense::RS2_OPTION_FILTER_ZO_PATCH_SIZE = static_cast<rs2_option>(RS2_OPTION_COUNT + 4), librealsense::RS2_OPTION_FILTER_ZO_MAX_VALUE = static_cast<rs2_option>(RS2_OPTION_COUNT + 5), librealsense::RS2_OPTION_FILTER_ZO_IR_MIN_VALUE = static_cast<rs2_option>(RS2_OPTION_COUNT + 6), librealsense::RS2_OPTION_FILTER_ZO_THRESHOLD_OFFSET = static_cast<rs2_option>(RS2_OPTION_COUNT + 7), librealsense::RS2_OPTION_FILTER_ZO_THRESHOLD_SCALE = static_cast<rs2_option>(RS2_OPTION_COUNT + 8) } |
Functions | |
| template<class T > | |
| void | librealsense::detect_zero_order (const double *rtd, const uint16_t *depth_data_in, const uint8_t *ir_data, T zero_pixel, const rs2_intrinsics &intrinsics, const zero_order_options &options, double zo_value, uint8_t iro_value) |
| double | librealsense::get_pixel_rtd (const rs2::vertex &v, int baseline) |
| template<typename T > | |
| T | librealsense::get_zo_point_value (std::vector< T > &values) |
| template<typename T > | |
| std::vector< T > | librealsense::get_zo_point_values (const T *frame_data_in, const rs2_intrinsics &intrinsics, int zo_point_x, int zo_point_y, int patch_r) |
| bool | librealsense::try_get_zo_rtd_ir_point_values (const double *rtd, const uint16_t *depth_data_in, const uint8_t *ir_data, const rs2_intrinsics &intrinsics, const zero_order_options &options, int zo_point_x, int zo_point_y, double *rtd_zo_value, uint8_t *ir_zo_data) |
| void | librealsense::z2rtd (const rs2::vertex *vertices, double *rtd, const rs2_intrinsics &intrinsics, int baseline) |
| template<class T > | |
| bool | librealsense::zero_order_invalidation (const uint16_t *depth_data_in, const uint8_t *ir_data, T zero_pixel, const rs2::vertex *vertices, rs2_intrinsics intrinsics, const zero_order_options &options, int zo_point_x, int zo_point_y) |
Variables | |
| const double | METER_TO_MM = 1000 |
Variable Documentation
| const double METER_TO_MM = 1000 |
Definition at line 8 of file zero-order.cpp.