Test of gait generator. More...
Include dependency graph for testGaitGenerator.cpp:
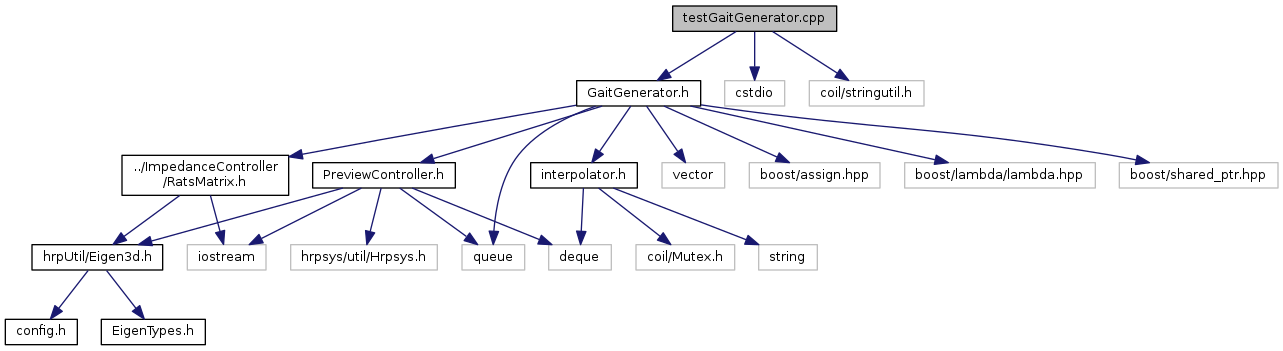
Go to the source code of this file.
Classes | |
| class | testGaitGenerator |
| class | testGaitGeneratorHRP2JSK |
| class | ValueDifferenceChecker< T > |
| class | ValueErrorChecker |
Macros | |
| #define | deg2rad(deg) (deg * M_PI / 180) |
| #define | eps_eq(a, b, epsilon) (std::fabs((a)-(b)) < (epsilon)) |
| #define | rad2deg(rad) (rad * 180 / M_PI) |
| #define | VEC1(s) std::vector<std::string> (1, s) |
Functions | |
| int | main (int argc, char *argv[]) |
| void | print_usage () |
Detailed Description
Test of gait generator.
- Date
- $Date$
$Id$ TODO Support test of quad walking Support test of foot_dif_angle Support footstep modification using capture point feedback Support TODO in check_end_values Supprot other robots and dt
Definition in file testGaitGenerator.cpp.
Macro Definition Documentation
| #define deg2rad | ( | deg | ) | (deg * M_PI / 180) |
Definition at line 28 of file testGaitGenerator.cpp.
Definition at line 23 of file testGaitGenerator.cpp.
| #define rad2deg | ( | rad | ) | (rad * 180 / M_PI) |
Definition at line 25 of file testGaitGenerator.cpp.
| #define VEC1 | ( | s | ) | std::vector<std::string> (1, s) |
Function Documentation
Definition at line 1404 of file testGaitGenerator.cpp.
| void print_usage | ( | ) |
Definition at line 1373 of file testGaitGenerator.cpp.