test of iSAM2 with smart stereo factors and IMU preintegration, originally used to debug valgrind invalid reads with Eigen More...
#include <gtsam/navigation/CombinedImuFactor.h>#include <gtsam/nonlinear/ISAM2.h>#include <gtsam_unstable/slam/SmartStereoProjectionPoseFactor.h>#include <fstream>#include <iostream>#include <sstream>#include <string>#include <vector>
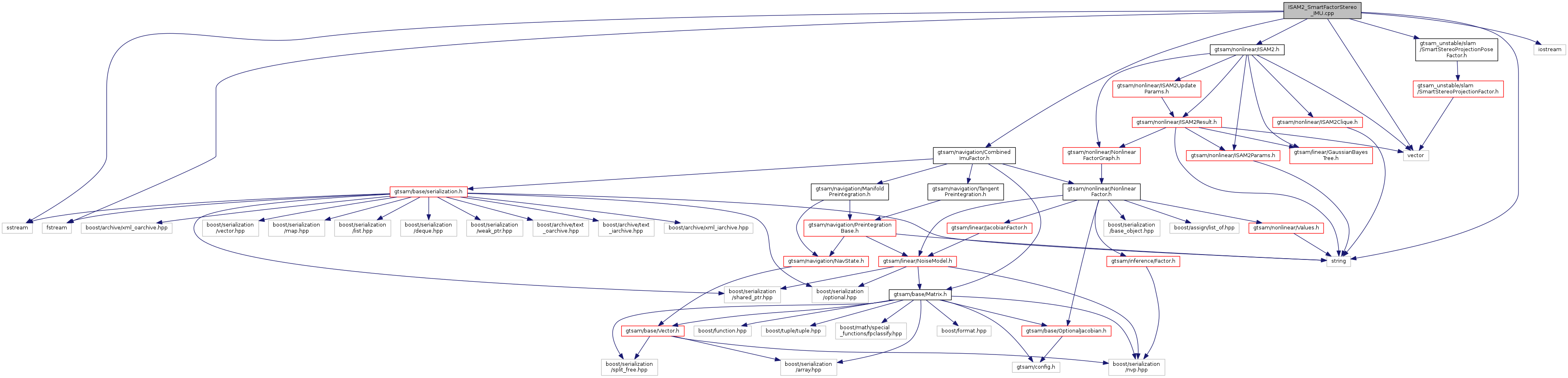
Include dependency graph for ISAM2_SmartFactorStereo_IMU.cpp:
Go to the source code of this file.
Classes | |
| struct | IMUHelper |
Functions | |
| int | main (int argc, char *argv[]) |
Detailed Description
test of iSAM2 with smart stereo factors and IMU preintegration, originally used to debug valgrind invalid reads with Eigen
Setup is a stationary stereo camera with an IMU attached. The data file is at examples/Data/ISAM2_SmartFactorStereo_IMU.txt It contains 5 frames of stereo matches and IMU data.
Definition in file ISAM2_SmartFactorStereo_IMU.cpp.
Function Documentation
Definition at line 97 of file ISAM2_SmartFactorStereo_IMU.cpp.