#include <collision_distance.h>
|
| void | AssignScene (ScenePtr scene) override |
| |
| std::vector< CollisionProxy > | get_collision_proxies () |
| |
| int | TaskSpaceDim () override |
| |
| void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRef phi) override |
| |
| void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRef phi, Eigen::MatrixXdRef J) override |
| |
| std::vector< KinematicFrameRequest > | GetFrames () const |
| |
| virtual std::vector< TaskVectorEntry > | GetLieGroupIndices () |
| |
| virtual void | InstantiateBase (const Initializer &init) |
| |
| virtual void | PreUpdate () |
| |
| virtual int | TaskSpaceJacobianDim () |
| |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi, Eigen::MatrixXdRef dphi_dx, Eigen::MatrixXdRef dphi_du) |
| |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi) |
| |
| virtual void | Update (Eigen::VectorXdRefConst x, Eigen::VectorXdRefConst u, Eigen::VectorXdRef phi, Eigen::MatrixXdRef dphi_dx, Eigen::MatrixXdRef dphi_du, HessianRef ddphi_ddx, HessianRef ddphi_ddu, HessianRef ddphi_dxdu) |
| |
| virtual void | Update (Eigen::VectorXdRefConst q, Eigen::VectorXdRef phi, Eigen::MatrixXdRef jacobian, HessianRef hessian) |
| |
| std::string | GetObjectName () |
| |
| void | InstantiateObject (const Initializer &init) |
| |
| | Object () |
| |
| virtual std::string | Print (const std::string &prepend) const |
| |
| virtual std::string | type () const |
| |
| virtual | ~Object () |
| |
| | InstantiableBase ()=default |
| |
| virtual | ~InstantiableBase ()=default |
| |
| std::vector< Initializer > | GetAllTemplates () const override |
| |
| Initializer | GetInitializerTemplate () override |
| |
| const CollisionDistanceInitializer & | GetParameters () const |
| |
| virtual void | Instantiate (const CollisionDistanceInitializer &init) |
| |
| void | InstantiateInternal (const Initializer &init) override |
| |
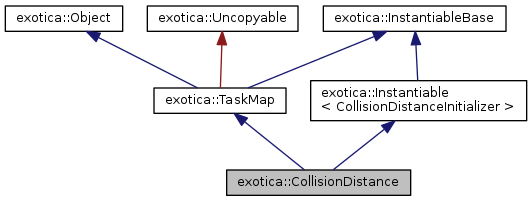
Definition at line 42 of file collision_distance.h.
| void exotica::CollisionDistance::AssignScene |
( |
ScenePtr |
scene | ) |
|
|
overridevirtual |
| std::vector<CollisionProxy> exotica::CollisionDistance::get_collision_proxies |
( |
| ) |
|
|
inline |
| void exotica::CollisionDistance::Initialize |
( |
| ) |
|
|
private |
| int exotica::CollisionDistance::TaskSpaceDim |
( |
| ) |
|
|
overridevirtual |
| bool exotica::CollisionDistance::check_self_collision_ = true |
|
private |
| std::vector<CollisionProxy> exotica::CollisionDistance::closest_proxies_ |
|
private |
| std::map<std::string, std::vector<std::string> > exotica::CollisionDistance::controlled_joint_to_collision_link_map_ |
|
private |
| int exotica::CollisionDistance::dim_ |
|
private |
| std::vector<std::string> exotica::CollisionDistance::robot_joints_ |
|
private |
| double exotica::CollisionDistance::robot_margin_ |
|
private |
| double exotica::CollisionDistance::world_margin_ |
|
private |
The documentation for this class was generated from the following files:
 Public Attributes inherited from exotica::TaskMap
Public Attributes inherited from exotica::TaskMap