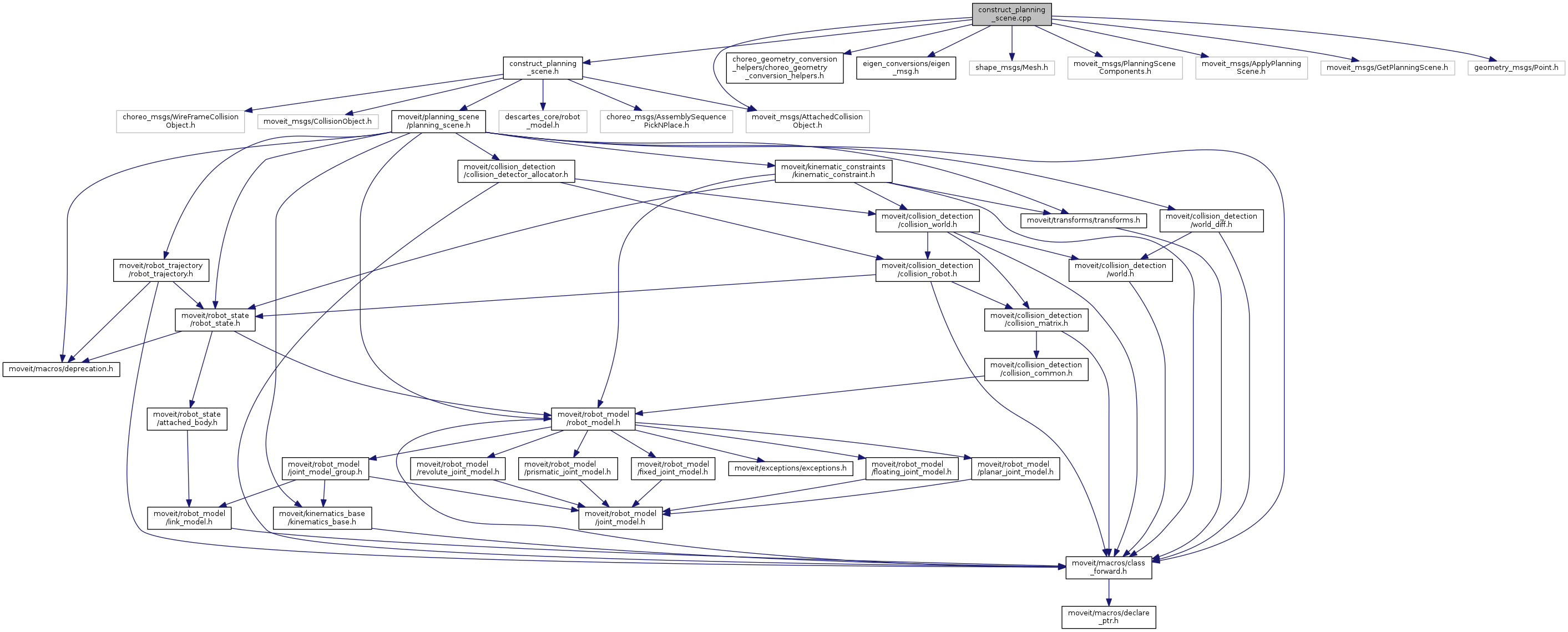
#include "construct_planning_scene.h"
#include <choreo_geometry_conversion_helpers/choreo_geometry_conversion_helpers.h>
#include <eigen_conversions/eigen_msg.h>
#include <shape_msgs/Mesh.h>
#include <moveit_msgs/PlanningSceneComponents.h>
#include <moveit_msgs/ApplyPlanningScene.h>
#include <moveit_msgs/GetPlanningScene.h>
#include <moveit_msgs/AttachedCollisionObject.h>
#include <geometry_msgs/Point.h>
Go to the source code of this file.
|
| void | choreo_process_planning::constructPlanningScene (const planning_scene::PlanningScenePtr base_scene, const std::vector< moveit_msgs::CollisionObject > &add_cos, const std::vector< moveit_msgs::CollisionObject > &remove_cos, const std::vector< moveit_msgs::AttachedCollisionObject > &attach_objs, const std::vector< moveit_msgs::AttachedCollisionObject > &detach_objs, planning_scene::PlanningScenePtr s) |
| |
| planning_scene::PlanningScenePtr | choreo_process_planning::constructPlanningScene (const planning_scene::PlanningScenePtr base_scene, const std::vector< moveit_msgs::CollisionObject > &add_cos, const std::vector< moveit_msgs::CollisionObject > &remove_cos, const std::vector< moveit_msgs::AttachedCollisionObject > &attach_objs, const std::vector< moveit_msgs::AttachedCollisionObject > &detach_objs) |
| |
| void | choreo_process_planning::constructPlanningScenes (moveit::core::RobotModelConstPtr moveit_model, const std::string &world_frame, const choreo_msgs::AssemblySequencePickNPlace &as_pnp, std::vector< std::vector< planning_scene::PlanningScenePtr >> &planning_scenes_transition, std::vector< std::vector< planning_scene::PlanningScenePtr >> &planning_scenes_subprocess) |
| |
| void | choreo_process_planning::constructPlanningScenes (moveit::core::RobotModelConstPtr moveit_model, const std::vector< choreo_msgs::WireFrameCollisionObject > &wf_collision_objs, std::vector< planning_scene::PlanningScenePtr > &planning_scenes_shrinked_approach, std::vector< planning_scene::PlanningScenePtr > &planning_scenes_shrinked_depart, std::vector< planning_scene::PlanningScenePtr > &planning_scenes_full) |
| |
| const std::string GET_PLANNING_SCENE_SERVICE = "get_planning_scene" |
|
static |
| const Eigen::Vector3d MESH_SCALE_VECTOR = Eigen::Vector3d(0.001, 0.001, 0.001) |
|
static |
| const std::string PICKNPLACE_EEF_NAME = "mit_arch_suction_gripper" |
|
static |