Visualizes a laser scan, received as a sensor_msgs::LaserScan. More...
#include <laser_scan_display.h>
Public Member Functions | |
| LaserScanDisplay () | |
| virtual void | reset () |
| Called to tell the display to clear its state. | |
| virtual void | update (float wall_dt, float ros_dt) |
| Called periodically by the visualization manager. | |
| ~LaserScanDisplay () | |
Protected Member Functions | |
| virtual void | onInitialize () |
| Do initialization. Overridden from MessageFilterDisplay. | |
| virtual void | processMessage (const sensor_msgs::LaserScanConstPtr &scan) |
| Process a single message. Overridden from MessageFilterDisplay. | |
Protected Attributes | |
| ros::Duration | filter_tolerance_ |
| PointCloudCommon * | point_cloud_common_ |
| laser_geometry::LaserProjection * | projector_ |
| IntProperty * | queue_size_property_ |
Private Slots | |
| void | updateQueueSize () |
Detailed Description
Visualizes a laser scan, received as a sensor_msgs::LaserScan.
Definition at line 49 of file laser_scan_display.h.
Constructor & Destructor Documentation
Definition at line 49 of file laser_scan_display.cpp.
Definition at line 64 of file laser_scan_display.cpp.
Member Function Documentation
| void rviz::LaserScanDisplay::onInitialize | ( | ) | [protected, virtual] |
Do initialization. Overridden from MessageFilterDisplay.
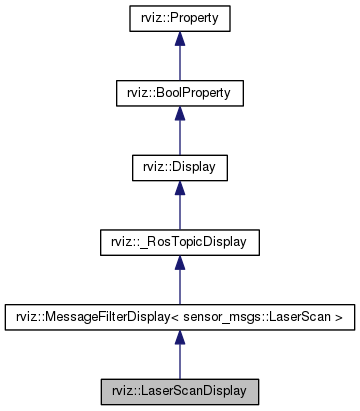
Reimplemented from rviz::MessageFilterDisplay< sensor_msgs::LaserScan >.
Definition at line 70 of file laser_scan_display.cpp.
| void rviz::LaserScanDisplay::processMessage | ( | const sensor_msgs::LaserScanConstPtr & | scan | ) | [protected, virtual] |
Process a single message. Overridden from MessageFilterDisplay.
Definition at line 81 of file laser_scan_display.cpp.
| void rviz::LaserScanDisplay::reset | ( | ) | [virtual] |
Called to tell the display to clear its state.
Reimplemented from rviz::MessageFilterDisplay< sensor_msgs::LaserScan >.
Definition at line 115 of file laser_scan_display.cpp.
| void rviz::LaserScanDisplay::update | ( | float | wall_dt, |
| float | ros_dt | ||
| ) | [virtual] |
Called periodically by the visualization manager.
- Parameters:
-
wall_dt Wall-clock time, in seconds, since the last time the update list was run through. ros_dt ROS time, in seconds, since the last time the update list was run through.
Reimplemented from rviz::Display.
Definition at line 110 of file laser_scan_display.cpp.
| void rviz::LaserScanDisplay::updateQueueSize | ( | ) | [private, slot] |
Definition at line 76 of file laser_scan_display.cpp.
Member Data Documentation
Definition at line 75 of file laser_scan_display.h.
Definition at line 72 of file laser_scan_display.h.
Definition at line 74 of file laser_scan_display.h.
IntProperty* rviz::LaserScanDisplay::queue_size_property_ [protected] |
Definition at line 70 of file laser_scan_display.h.
The documentation for this class was generated from the following files: