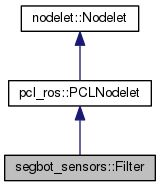
Filter represents the base filter class. Some generic 3D operations that are applicable to all filters are defined here as static methods. More...
#include <segbot_velodyne_outlier_removal.h>
Public Types | |
| typedef boost::shared_ptr < const std::vector< int > > | IndicesConstPtr |
| typedef boost::shared_ptr < std::vector< int > > | IndicesPtr |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
Public Member Functions | |
| Filter () | |
Protected Member Functions | |
| virtual bool | child_init (ros::NodeHandle &nh, bool &has_service) |
| Child initialization routine. | |
| void | computePublish (const PointCloud2::ConstPtr &input, const IndicesPtr &indices) |
| Call the child filter () method, optionally transform the result, and publish it. | |
| virtual void | filter (const PointCloud2::ConstPtr &input, const IndicesPtr &indices, PointCloud2 &output)=0 |
| Virtual abstract filter method. To be implemented by every child. | |
| virtual void | onInit () |
| Nodelet initialization routine. | |
Protected Attributes | |
| std::string | filter_field_name_ |
| The desired user filter field name. | |
| double | filter_limit_max_ |
| The maximum allowed filter value a point will be considered from. | |
| double | filter_limit_min_ |
| The minimum allowed filter value a point will be considered from. | |
| bool | filter_limit_negative_ |
| Set to true if we want to return the data outside (filter_limit_min_;filter_limit_max_). Default: false. | |
| boost::mutex | mutex_ |
| Internal mutex. | |
| ros::Subscriber | sub_input_ |
| The input PointCloud subscriber. | |
| message_filters::Subscriber < PointCloud2 > | sub_input_filter_ |
| std::string | tf_input_frame_ |
| The input TF frame the data should be transformed into, if input.header.frame_id is different. | |
| std::string | tf_input_orig_frame_ |
| The original data input TF frame. | |
| std::string | tf_output_frame_ |
| The output TF frame the data should be transformed into, if input.header.frame_id is different. | |
Private Member Functions | |
| virtual void | config_callback (pcl_ros::FilterConfig &config, uint32_t level) |
| Dynamic reconfigure service callback. | |
| void | input_indices_callback (const PointCloud2::ConstPtr &cloud, const PointIndicesConstPtr &indices) |
| PointCloud2 + Indices data callback. | |
Private Attributes | |
| boost::shared_ptr < dynamic_reconfigure::Server < pcl_ros::FilterConfig > > | srv_ |
| Pointer to a dynamic reconfigure service. | |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ApproximateTime < PointCloud2, PointIndices > > > | sync_input_indices_a_ |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ExactTime < PointCloud2, PointIndices > > > | sync_input_indices_e_ |
| Synchronized input, and indices. | |
Detailed Description
Filter represents the base filter class. Some generic 3D operations that are applicable to all filters are defined here as static methods.
Definition at line 72 of file segbot_velodyne_outlier_removal.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const std::vector<int> > segbot_sensors::Filter::IndicesConstPtr |
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 78 of file segbot_velodyne_outlier_removal.h.
| typedef boost::shared_ptr<std::vector<int> > segbot_sensors::Filter::IndicesPtr |
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 77 of file segbot_velodyne_outlier_removal.h.
| typedef sensor_msgs::PointCloud2 segbot_sensors::Filter::PointCloud2 |
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 75 of file segbot_velodyne_outlier_removal.h.
Constructor & Destructor Documentation
| segbot_sensors::Filter::Filter | ( | ) | [inline] |
Definition at line 80 of file segbot_velodyne_outlier_removal.h.
Member Function Documentation
| virtual bool segbot_sensors::Filter::child_init | ( | ros::NodeHandle & | nh, |
| bool & | has_service | ||
| ) | [inline, protected, virtual] |
Child initialization routine.
- Parameters:
-
nh ROS node handle has_service set to true if the child has a Dynamic Reconfigure service
Definition at line 117 of file segbot_velodyne_outlier_removal.h.
| void segbot_sensors::Filter::computePublish | ( | const PointCloud2::ConstPtr & | input, |
| const IndicesPtr & | indices | ||
| ) | [protected] |
Call the child filter () method, optionally transform the result, and publish it.
- Parameters:
-
input the input point cloud dataset. indices a pointer to the vector of point indices to use.
| virtual void segbot_sensors::Filter::config_callback | ( | pcl_ros::FilterConfig & | config, |
| uint32_t | level | ||
| ) | [private, virtual] |
Dynamic reconfigure service callback.
| virtual void segbot_sensors::Filter::filter | ( | const PointCloud2::ConstPtr & | input, |
| const IndicesPtr & | indices, | ||
| PointCloud2 & | output | ||
| ) | [protected, pure virtual] |
Virtual abstract filter method. To be implemented by every child.
- Parameters:
-
input the input point cloud dataset. indices a pointer to the vector of point indices to use. output the resultant filtered PointCloud2
| void segbot_sensors::Filter::input_indices_callback | ( | const PointCloud2::ConstPtr & | cloud, |
| const PointIndicesConstPtr & | indices | ||
| ) | [private] |
PointCloud2 + Indices data callback.
| virtual void segbot_sensors::Filter::onInit | ( | ) | [protected, virtual] |
Nodelet initialization routine.
Reimplemented from pcl_ros::PCLNodelet.
Member Data Documentation
The desired user filter field name.
Definition at line 89 of file segbot_velodyne_outlier_removal.h.
double segbot_sensors::Filter::filter_limit_max_ [protected] |
The maximum allowed filter value a point will be considered from.
Definition at line 95 of file segbot_velodyne_outlier_removal.h.
double segbot_sensors::Filter::filter_limit_min_ [protected] |
The minimum allowed filter value a point will be considered from.
Definition at line 92 of file segbot_velodyne_outlier_removal.h.
bool segbot_sensors::Filter::filter_limit_negative_ [protected] |
Set to true if we want to return the data outside (filter_limit_min_;filter_limit_max_). Default: false.
Definition at line 98 of file segbot_velodyne_outlier_removal.h.
boost::mutex segbot_sensors::Filter::mutex_ [protected] |
Internal mutex.
Definition at line 110 of file segbot_velodyne_outlier_removal.h.
boost::shared_ptr<dynamic_reconfigure::Server<pcl_ros::FilterConfig> > segbot_sensors::Filter::srv_ [private] |
Pointer to a dynamic reconfigure service.
Definition at line 145 of file segbot_velodyne_outlier_removal.h.
ros::Subscriber segbot_sensors::Filter::sub_input_ [protected] |
The input PointCloud subscriber.
Definition at line 84 of file segbot_velodyne_outlier_removal.h.
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 86 of file segbot_velodyne_outlier_removal.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ApproximateTime<PointCloud2, PointIndices> > > segbot_sensors::Filter::sync_input_indices_a_ [private] |
Definition at line 149 of file segbot_velodyne_outlier_removal.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ExactTime<PointCloud2, PointIndices> > > segbot_sensors::Filter::sync_input_indices_e_ [private] |
Synchronized input, and indices.
Definition at line 148 of file segbot_velodyne_outlier_removal.h.
std::string segbot_sensors::Filter::tf_input_frame_ [protected] |
The input TF frame the data should be transformed into, if input.header.frame_id is different.
Definition at line 101 of file segbot_velodyne_outlier_removal.h.
The original data input TF frame.
Definition at line 104 of file segbot_velodyne_outlier_removal.h.
std::string segbot_sensors::Filter::tf_output_frame_ [protected] |
The output TF frame the data should be transformed into, if input.header.frame_id is different.
Definition at line 107 of file segbot_velodyne_outlier_removal.h.
The documentation for this class was generated from the following file: