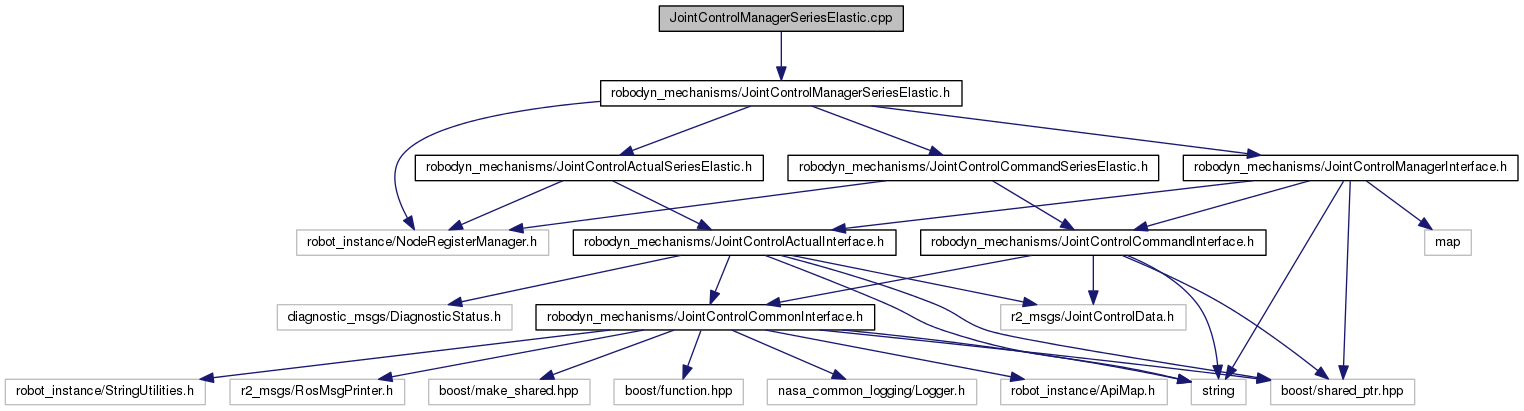
Include dependency graph for JointControlManagerSeriesElastic.cpp:
Go to the source code of this file.
Detailed Description
Definition in file JointControlManagerSeriesElastic.cpp.
Go to the source code of this file.
Definition in file JointControlManagerSeriesElastic.cpp.