#include <MinJerkTrajectoryFactory.h>
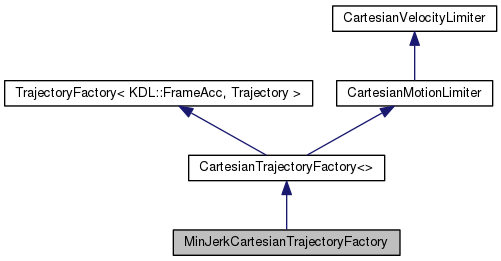
Inheritance diagram for MinJerkCartesianTrajectoryFactory:
Public Member Functions | |
| virtual boost::shared_ptr < CartesianTrajectory > | getTrajectory (const KDL::FrameAcc &startPose, const KDL::FrameAcc &goalPose, double timeToFinish=-1.) const |
| getTrajectory | |
| MinJerkCartesianTrajectoryFactory () | |
| virtual | ~MinJerkCartesianTrajectoryFactory () |
Detailed Description
Definition at line 32 of file MinJerkTrajectoryFactory.h.
Constructor & Destructor Documentation
Definition at line 35 of file MinJerkTrajectoryFactory.h.
| virtual MinJerkCartesianTrajectoryFactory::~MinJerkCartesianTrajectoryFactory | ( | ) | [inline, virtual] |
Definition at line 36 of file MinJerkTrajectoryFactory.h.
Member Function Documentation
| boost::shared_ptr< CartesianTrajectory > MinJerkCartesianTrajectoryFactory::getTrajectory | ( | const KDL::FrameAcc & | startPose, |
| const KDL::FrameAcc & | goalPose, | ||
| double | timeToFinish = -1. |
||
| ) | const [virtual] |
getTrajectory
- Parameters:
-
startPose start position goalPose goal position timeToFinish time to execute move
Derived classes should implement a trajectory generation that produces equally spaced (by timeStep) points along the path without exceeding the velocity limits. If timeToFinish is larger than the time required to satisfy velocity limits, the trajectory should take that long to finish.
Definition at line 12 of file MinJerkTrajectoryFactory.cpp.
The documentation for this class was generated from the following files: