#include <ros/ros.h>#include <boost/thread/mutex.hpp>#include <boost/thread/thread.hpp>#include <wpi_jaco_msgs/AngularCommand.h>#include <wpi_jaco_msgs/CartesianCommand.h>#include <signal.h>#include <stdio.h>#include <termios.h>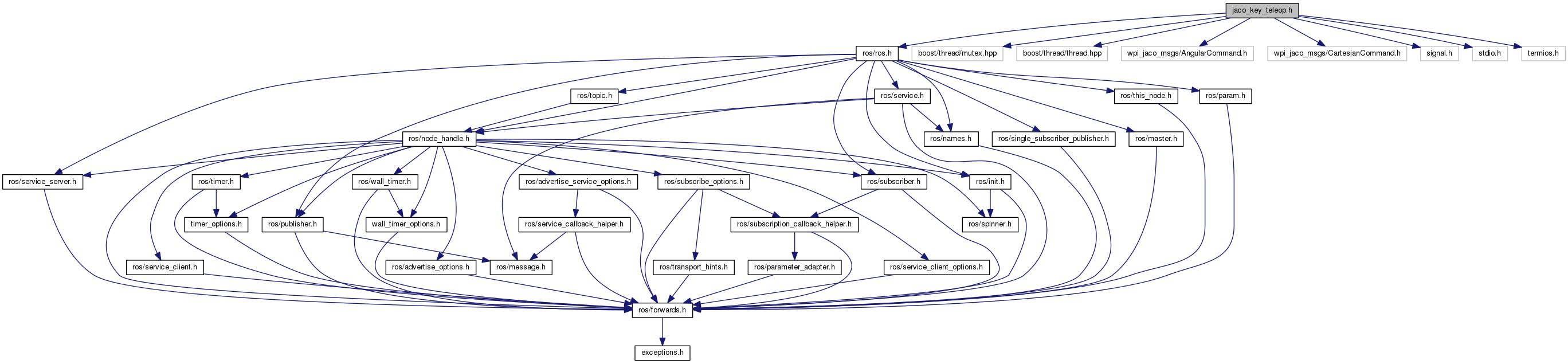
Go to the source code of this file.
Classes | |
| class | jaco_key_teleop |
Defines | |
| #define | ARM_CONTROL 0 |
| #define | FINGER_CONTROL 1 |
| #define | KEYCODE_1 0x31 |
| #define | KEYCODE_2 0x32 |
| #define | KEYCODE_3 0x33 |
| #define | KEYCODE_A 0x61 |
| #define | KEYCODE_D 0x64 |
| #define | KEYCODE_DOWN 0x42 |
| #define | KEYCODE_E 0x65 |
| #define | KEYCODE_F 0x66 |
| #define | KEYCODE_H 0x68 |
| #define | KEYCODE_LEFT 0x44 |
| #define | KEYCODE_Q 0x71 |
| #define | KEYCODE_R 0x72 |
| #define | KEYCODE_RIGHT 0x43 |
| #define | KEYCODE_S 0x73 |
| #define | KEYCODE_UP 0x41 |
| #define | KEYCODE_W 0x77 |
| Allows for control of the JACO arm with a keyboard. | |
| #define | MAX_ANG_VEL 1.047 |
| #define | MAX_FINGER_VEL 30 |
| #define | MAX_TRANS_VEL .175 |
Functions | |
| int | main (int argc, char **argv) |
| Creates and runs the jaco_key_teleop node. | |
| void | shutdown (int sig) |
| A function to close ROS and exit the program. | |
Define Documentation
| #define ARM_CONTROL 0 |
Definition at line 72 of file jaco_key_teleop.h.
| #define FINGER_CONTROL 1 |
Definition at line 73 of file jaco_key_teleop.h.
| #define KEYCODE_1 0x31 |
Definition at line 66 of file jaco_key_teleop.h.
| #define KEYCODE_2 0x32 |
Definition at line 67 of file jaco_key_teleop.h.
| #define KEYCODE_3 0x33 |
Definition at line 68 of file jaco_key_teleop.h.
| #define KEYCODE_A 0x61 |
Definition at line 55 of file jaco_key_teleop.h.
| #define KEYCODE_D 0x64 |
Definition at line 57 of file jaco_key_teleop.h.
| #define KEYCODE_DOWN 0x42 |
Definition at line 65 of file jaco_key_teleop.h.
| #define KEYCODE_E 0x65 |
Definition at line 59 of file jaco_key_teleop.h.
| #define KEYCODE_F 0x66 |
Definition at line 61 of file jaco_key_teleop.h.
| #define KEYCODE_H 0x68 |
Definition at line 69 of file jaco_key_teleop.h.
| #define KEYCODE_LEFT 0x44 |
Definition at line 63 of file jaco_key_teleop.h.
| #define KEYCODE_Q 0x71 |
Definition at line 58 of file jaco_key_teleop.h.
| #define KEYCODE_R 0x72 |
Definition at line 60 of file jaco_key_teleop.h.
| #define KEYCODE_RIGHT 0x43 |
Definition at line 62 of file jaco_key_teleop.h.
| #define KEYCODE_S 0x73 |
Definition at line 56 of file jaco_key_teleop.h.
| #define KEYCODE_UP 0x41 |
Definition at line 64 of file jaco_key_teleop.h.
| #define KEYCODE_W 0x77 |
Allows for control of the JACO arm with a keyboard.
.h jaco_key_teleop creates a ROS node that allows the control of the JACO arm with a keyboard.
- Date:
- June 26, 2014
Definition at line 54 of file jaco_key_teleop.h.
| #define MAX_ANG_VEL 1.047 |
The maximum angular velocity.
Definition at line 93 of file jaco_key_teleop.h.
| #define MAX_FINGER_VEL 30 |
The maximum velocity for a finger.
Definition at line 86 of file jaco_key_teleop.h.
| #define MAX_TRANS_VEL .175 |
The maximum translational velocity.
Definition at line 80 of file jaco_key_teleop.h.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Creates and runs the jaco_key_teleop node.
- Parameters:
-
argc argument count that is passed to ros::init argv arguments that are passed to ros::init
- Returns:
- EXIT_SUCCESS if the node runs correctly
Creates and runs the jaco_key_teleop node.
- Parameters:
-
argc argument count that is passed to ros::init argv arguments that are passed to ros::init
- Returns:
- EXIT_SUCCESS if the node runs correctly
Definition at line 432 of file jaco_joy_teleop.cpp.
| void shutdown | ( | int | sig | ) |
A function to close ROS and exit the program.
- Parameters:
-
sig The signal value.
Definition at line 343 of file jaco_key_teleop.cpp.