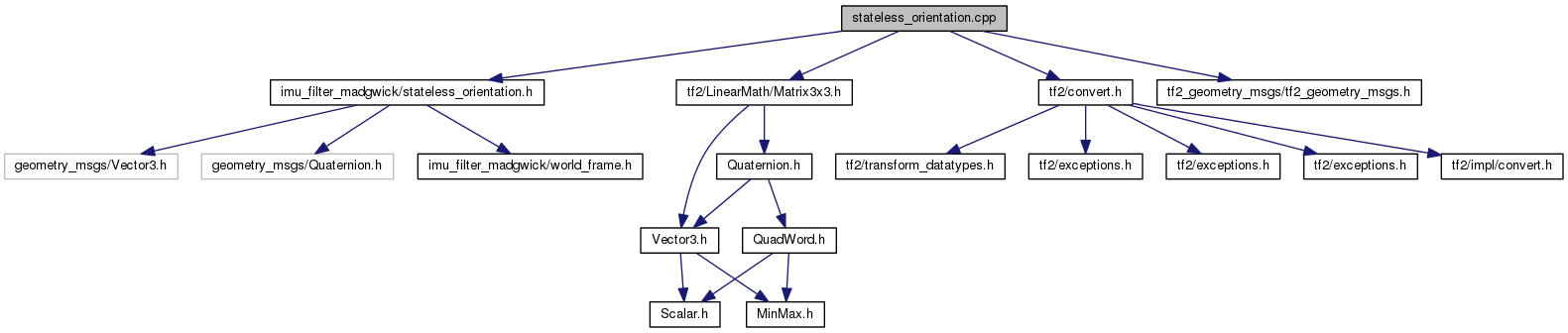
#include "imu_filter_madgwick/stateless_orientation.h"#include <tf2/LinearMath/Matrix3x3.h>#include <tf2/convert.h>#include <tf2_geometry_msgs/tf2_geometry_msgs.h>
Include dependency graph for stateless_orientation.cpp:
Go to the source code of this file.
Functions | |
| template<typename T > | |
| static void | crossProduct (T ax, T ay, T az, T bx, T by, T bz, T &rx, T &ry, T &rz) |
| template<typename T > | |
| static T | normalizeVector (T &vx, T &vy, T &vz) |
Function Documentation
template<typename T >
| static void crossProduct | ( | T | ax, |
| T | ay, | ||
| T | az, | ||
| T | bx, | ||
| T | by, | ||
| T | bz, | ||
| T & | rx, | ||
| T & | ry, | ||
| T & | rz | ||
| ) | [inline, static] |
Definition at line 31 of file stateless_orientation.cpp.
template<typename T >
| static T normalizeVector | ( | T & | vx, |
| T & | vy, | ||
| T & | vz | ||
| ) | [inline, static] |
Definition at line 42 of file stateless_orientation.cpp.