Abstract Class representing all Conditional Gaussians with additive gaussian noise. More...
#include <conditionalgaussian_additivenoise.h>
Public Member Functions | |
| const MatrixWrapper::ColumnVector & | AdditiveNoiseMuGet () const |
| Get the mean Value of the Additive Gaussian uncertainty. | |
| void | AdditiveNoiseMuSet (const MatrixWrapper::ColumnVector &mu) |
| Set the mean Value of the Additive Gaussian uncertainty. | |
| const MatrixWrapper::SymmetricMatrix & | AdditiveNoiseSigmaGet () const |
| Get the covariance matrix of the Additive Gaussian uncertainty. | |
| void | AdditiveNoiseSigmaSet (const MatrixWrapper::SymmetricMatrix &sigma) |
| Set the covariance of the Additive Gaussian uncertainty. | |
| ConditionalGaussianAdditiveNoise (const Gaussian &gaus, int num_conditional_arguments=1) | |
| Constructor. | |
| ConditionalGaussianAdditiveNoise (int dim=0, int num_conditional_arguments=0) | |
| Constructor 2, Gaussian not yet known. | |
| virtual MatrixWrapper::SymmetricMatrix | CovarianceGet () const |
| Get the Covariance Matrix E[(x - E[x])^2] of the Analytic pdf. | |
| virtual | ~ConditionalGaussianAdditiveNoise () |
| Destructor. | |
Protected Attributes | |
| MatrixWrapper::ColumnVector | _additiveNoise_Mu |
| additive noise expected value | |
| MatrixWrapper::SymmetricMatrix | _additiveNoise_Sigma |
| additive noise covariance | |
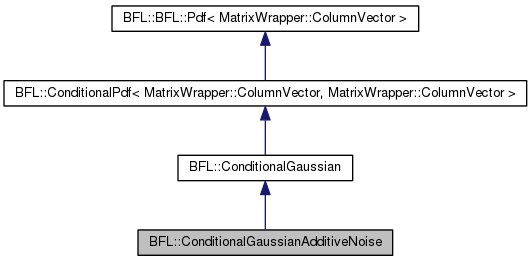
Detailed Description
Abstract Class representing all Conditional Gaussians with additive gaussian noise.
This class represents all Pdf's of the type
![\[ P ( A | B, C, D, ... ) \]](form_43.png)
where
![\[ \mu_A = f(B,C,D, ...) + mu_{additiveNoise} \]](form_47.png)
and
![\[ \Sigma_A = \Sigma_{additiveNoise} \]](form_48.png)
and
![\[ A = N(\mu_A, \Sigma_A) \]](form_46.png)
f is not necessarily a analytical function
Definition at line 39 of file conditionalgaussian_additivenoise.h.
Constructor & Destructor Documentation
| BFL::ConditionalGaussianAdditiveNoise::ConditionalGaussianAdditiveNoise | ( | const Gaussian & | gaus, |
| int | num_conditional_arguments = 1 |
||
| ) |
Constructor.
- Parameters:
-
gaus Gaussian representing the additive uncertainty num_conditional_arguments The number of conditional arguments.
| BFL::ConditionalGaussianAdditiveNoise::ConditionalGaussianAdditiveNoise | ( | int | dim = 0, |
| int | num_conditional_arguments = 0 |
||
| ) |
Constructor 2, Gaussian not yet known.
- Parameters:
-
dim Dimension of state num_conditional_arguments The number of conditional arguments.
| virtual BFL::ConditionalGaussianAdditiveNoise::~ConditionalGaussianAdditiveNoise | ( | ) | [virtual] |
Destructor.
Member Function Documentation
| const MatrixWrapper::ColumnVector& BFL::ConditionalGaussianAdditiveNoise::AdditiveNoiseMuGet | ( | ) | const |
| void BFL::ConditionalGaussianAdditiveNoise::AdditiveNoiseMuSet | ( | const MatrixWrapper::ColumnVector & | mu | ) |
| const MatrixWrapper::SymmetricMatrix& BFL::ConditionalGaussianAdditiveNoise::AdditiveNoiseSigmaGet | ( | ) | const |
| void BFL::ConditionalGaussianAdditiveNoise::AdditiveNoiseSigmaSet | ( | const MatrixWrapper::SymmetricMatrix & | sigma | ) |
| virtual MatrixWrapper::SymmetricMatrix BFL::ConditionalGaussianAdditiveNoise::CovarianceGet | ( | ) | const [virtual] |
Get the Covariance Matrix E[(x - E[x])^2] of the Analytic pdf.
Get first order statistic (Covariance) of this AnalyticPdf
- Returns:
- The Covariance of the Pdf (a SymmetricMatrix of dim DIMENSION)
- Todo:
- extend this more general to n-th order statistic
- Bug:
- Discrete pdfs should not be able to use this!
Reimplemented from BFL::BFL::Pdf< MatrixWrapper::ColumnVector >.
Member Data Documentation
MatrixWrapper::ColumnVector BFL::ConditionalGaussianAdditiveNoise::_additiveNoise_Mu [protected] |
additive noise expected value
Definition at line 94 of file conditionalgaussian_additivenoise.h.
MatrixWrapper::SymmetricMatrix BFL::ConditionalGaussianAdditiveNoise::_additiveNoise_Sigma [protected] |
additive noise covariance
Definition at line 97 of file conditionalgaussian_additivenoise.h.
The documentation for this class was generated from the following file: