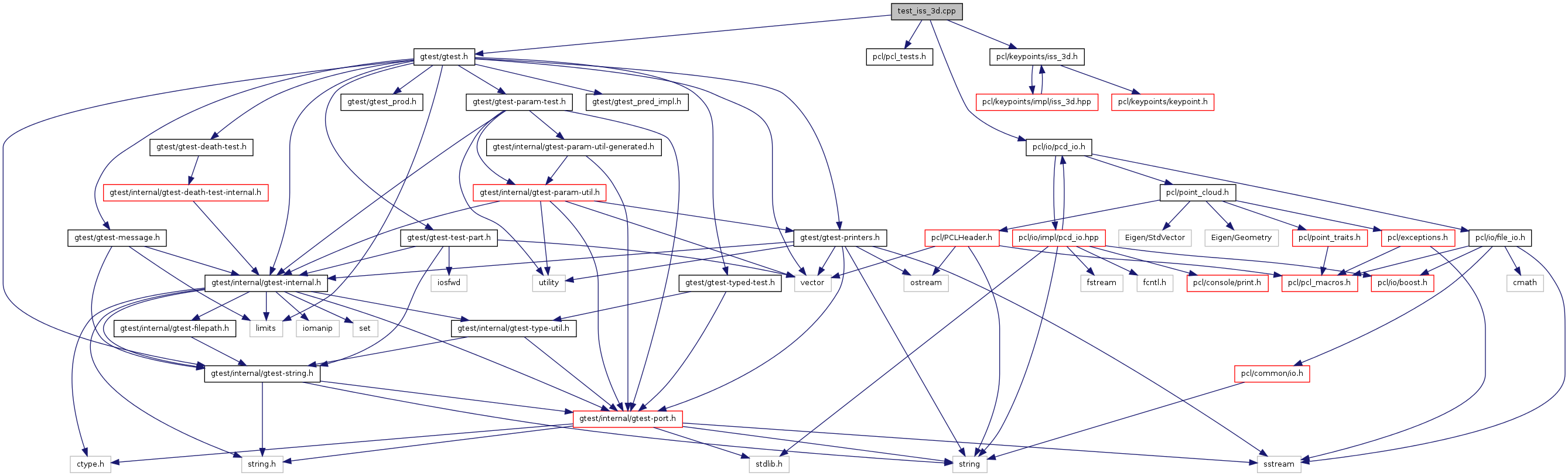
#include <gtest/gtest.h>#include <pcl/pcl_tests.h>#include <pcl/io/pcd_io.h>#include <pcl/keypoints/iss_3d.h>
Include dependency graph for test_iss_3d.cpp:
Go to the source code of this file.
Functions | |
| double | cloud_resolution (0.0058329) |
| int | main (int argc, char **argv) |
| TEST (PCL, ISSKeypoint3D_WBE) | |
| TEST (PCL, ISSKeypoint3D_BE) | |
Variables | |
| PointCloud< PointXYZ >::Ptr | cloud (new PointCloud< PointXYZ >()) |
| search::KdTree< PointXYZ >::Ptr | tree (new search::KdTree< PointXYZ >()) |
Function Documentation
| double cloud_resolution | ( | 0. | 0058329 | ) |
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 158 of file test_iss_3d.cpp.
| TEST | ( | PCL | , |
| ISSKeypoint3D_WBE | |||
| ) |
Definition at line 55 of file test_iss_3d.cpp.
| TEST | ( | PCL | , |
| ISSKeypoint3D_BE | |||
| ) |
Definition at line 103 of file test_iss_3d.cpp.
Variable Documentation
| PointCloud<PointXYZ>::Ptr cloud(new PointCloud< PointXYZ >()) |
| search::KdTree<PointXYZ>::Ptr tree(new search::KdTree< PointXYZ >()) |