#include <pcl/common/eigen.h>#include <pcl/console/print.h>#include <pcl/common/impl/projection_matrix.hpp>
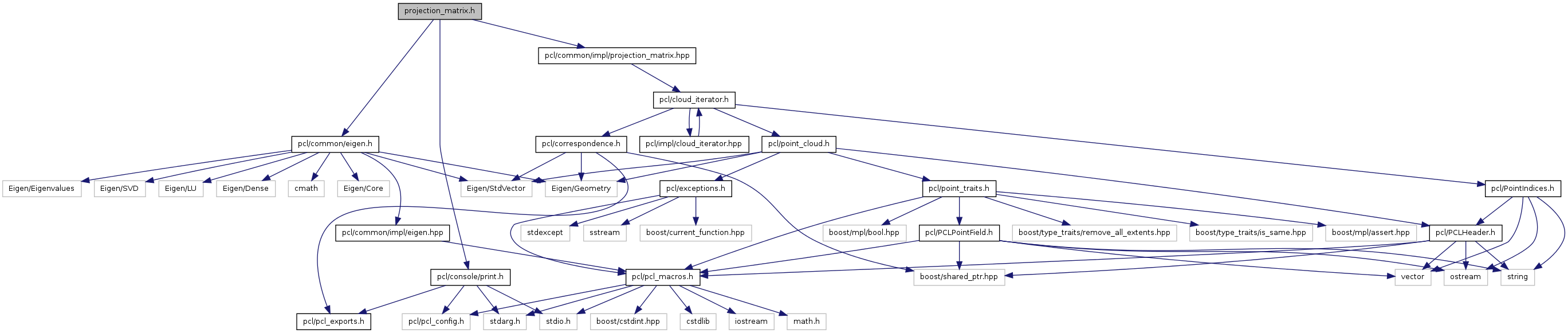
Include dependency graph for projection_matrix.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | pcl |
Functions | |
| template<typename PointT > | |
| double | pcl::estimateProjectionMatrix (typename pcl::PointCloud< PointT >::ConstPtr cloud, Eigen::Matrix< float, 3, 4, Eigen::RowMajor > &projection_matrix, const std::vector< int > &indices=std::vector< int >()) |
| Estimates the projection matrix P = K * (R|-R*t) from organized point clouds, with K = [[fx, s, cx], [0, fy, cy], [0, 0, 1]] R = rotation matrix and t = translation vector. | |
| PCL_EXPORTS void | pcl::getCameraMatrixFromProjectionMatrix (const Eigen::Matrix< float, 3, 4, Eigen::RowMajor > &projection_matrix, Eigen::Matrix3f &camera_matrix) |
| Determines the camera matrix from the given projection matrix. | |