PrincipalCurvaturesEstimation estimates the directions (eigenvectors) and magnitudes (eigenvalues) of principal surface curvatures for a given point cloud dataset containing points and normals. More...
#include <principal_curvatures.h>
Public Types | |
| typedef boost::shared_ptr < const PrincipalCurvaturesEstimation < PointInT, PointNT, PointOutT > > | ConstPtr |
| typedef pcl::PointCloud< PointInT > | PointCloudIn |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
| typedef boost::shared_ptr < PrincipalCurvaturesEstimation < PointInT, PointNT, PointOutT > > | Ptr |
Public Member Functions | |
| void | computePointPrincipalCurvatures (const pcl::PointCloud< PointNT > &normals, int p_idx, const std::vector< int > &indices, float &pcx, float &pcy, float &pcz, float &pc1, float &pc2) |
| Perform Principal Components Analysis (PCA) on the point normals of a surface patch in the tangent plane of the given point normal, and return the principal curvature (eigenvector of the max eigenvalue), along with both the max (pc1) and min (pc2) eigenvalues. | |
| PrincipalCurvaturesEstimation () | |
| Empty constructor. | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate the principal curvature (eigenvector of the max eigenvalue), along with both the max (pc1) and min (pc2) eigenvalues for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
Private Attributes | |
| EIGEN_ALIGN16 Eigen::Matrix3f | covariance_matrix_ |
| Placeholder for the 3x3 covariance matrix at each surface patch. | |
| Eigen::Vector3f | demean_ |
| Temporary point placeholder. | |
| Eigen::Vector3f | eigenvalues_ |
| eigenvalues placeholder for a covariance matrix. | |
| Eigen::Vector3f | eigenvector_ |
| SSE aligned eigenvectors placeholder for a covariance matrix. | |
| std::vector< Eigen::Vector3f > | projected_normals_ |
| A pointer to the input dataset that contains the point normals of the XYZ dataset. | |
| Eigen::Vector3f | xyz_centroid_ |
| SSE aligned placeholder for the XYZ centroid of a surface patch. | |
Detailed Description
template<typename PointInT, typename PointNT, typename PointOutT = pcl::PrincipalCurvatures>
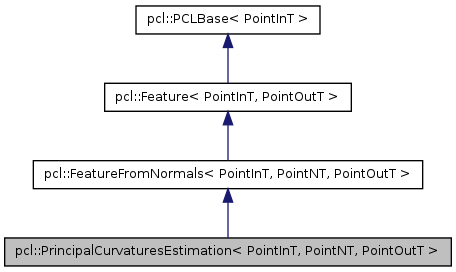
class pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >
PrincipalCurvaturesEstimation estimates the directions (eigenvectors) and magnitudes (eigenvalues) of principal surface curvatures for a given point cloud dataset containing points and normals.
The recommended PointOutT is pcl::PrincipalCurvatures.
- Note:
- The code is stateful as we do not expect this class to be multicore parallelized. Please look at NormalEstimationOMP for an example on how to extend this to parallel implementations.
Definition at line 61 of file principal_curvatures.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const PrincipalCurvaturesEstimation<PointInT, PointNT, PointOutT> > pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::ConstPtr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Definition at line 65 of file principal_curvatures.h.
| typedef pcl::PointCloud<PointInT> pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::PointCloudIn |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Definition at line 76 of file principal_curvatures.h.
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Definition at line 75 of file principal_curvatures.h.
| typedef boost::shared_ptr<PrincipalCurvaturesEstimation<PointInT, PointNT, PointOutT> > pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::Ptr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Definition at line 64 of file principal_curvatures.h.
Constructor & Destructor Documentation
| pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::PrincipalCurvaturesEstimation | ( | ) | [inline] |
Empty constructor.
Definition at line 79 of file principal_curvatures.h.
Member Function Documentation
| void pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Estimate the principal curvature (eigenvector of the max eigenvalue), along with both the max (pc1) and min (pc2) eigenvalues for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Parameters:
-
[out] output the resultant point cloud model dataset that contains the principal curvature estimates
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 114 of file principal_curvatures.hpp.
| void pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::computePointPrincipalCurvatures | ( | const pcl::PointCloud< PointNT > & | normals, |
| int | p_idx, | ||
| const std::vector< int > & | indices, | ||
| float & | pcx, | ||
| float & | pcy, | ||
| float & | pcz, | ||
| float & | pc1, | ||
| float & | pc2 | ||
| ) |
Perform Principal Components Analysis (PCA) on the point normals of a surface patch in the tangent plane of the given point normal, and return the principal curvature (eigenvector of the max eigenvalue), along with both the max (pc1) and min (pc2) eigenvalues.
- Parameters:
-
[in] normals the point cloud normals [in] p_idx the query point at which the least-squares plane was estimated [in] indices the point cloud indices that need to be used [out] pcx the principal curvature X direction [out] pcy the principal curvature Y direction [out] pcz the principal curvature Z direction [out] pc1 the max eigenvalue of curvature [out] pc2 the min eigenvalue of curvature
Definition at line 48 of file principal_curvatures.hpp.
Member Data Documentation
EIGEN_ALIGN16 Eigen::Matrix3f pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::covariance_matrix_ [private] |
Placeholder for the 3x3 covariance matrix at each surface patch.
Definition at line 128 of file principal_curvatures.h.
Eigen::Vector3f pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::demean_ [private] |
Temporary point placeholder.
Definition at line 125 of file principal_curvatures.h.
Eigen::Vector3f pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::eigenvalues_ [private] |
eigenvalues placeholder for a covariance matrix.
Definition at line 133 of file principal_curvatures.h.
Eigen::Vector3f pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::eigenvector_ [private] |
SSE aligned eigenvectors placeholder for a covariance matrix.
Definition at line 131 of file principal_curvatures.h.
std::vector<Eigen::Vector3f> pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::projected_normals_ [private] |
A pointer to the input dataset that contains the point normals of the XYZ dataset.
Definition at line 119 of file principal_curvatures.h.
Eigen::Vector3f pcl::PrincipalCurvaturesEstimation< PointInT, PointNT, PointOutT >::xyz_centroid_ [private] |
SSE aligned placeholder for the XYZ centroid of a surface patch.
Definition at line 122 of file principal_curvatures.h.
The documentation for this class was generated from the following files: