PassThrough passes points in a cloud based on constraints for one particular field of the point type. More...
#include <passthrough.h>
Public Types | |
| typedef boost::shared_ptr < const PassThrough< PointT > > | ConstPtr |
| typedef boost::shared_ptr < PassThrough< PointT > > | Ptr |
Public Member Functions | |
| std::string const | getFilterFieldName () |
| Retrieve the name of the field to be used for filtering data. | |
| void | getFilterLimits (float &limit_min, float &limit_max) |
| Get the numerical limits for the field for filtering data. | |
| void | getFilterLimitsNegative (bool &limit_negative) |
| Get whether the data outside the interval (min/max) is to be returned (true) or inside (false). | |
| bool | getFilterLimitsNegative () |
| Get whether the data outside the interval (min/max) is to be returned (true) or inside (false). | |
| PassThrough (bool extract_removed_indices=false) | |
| Constructor. | |
| void | setFilterFieldName (const std::string &field_name) |
| Provide the name of the field to be used for filtering data. | |
| void | setFilterLimits (const float &limit_min, const float &limit_max) |
| Set the numerical limits for the field for filtering data. | |
| void | setFilterLimitsNegative (const bool limit_negative) |
| Set to true if we want to return the data outside the interval specified by setFilterLimits (min, max) Default: false. | |
Protected Types | |
| typedef pcl::traits::fieldList < PointT >::type | FieldList |
| typedef FilterIndices< PointT > ::PointCloud | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Protected Member Functions | |
| void | applyFilter (PointCloud &output) |
| Filtered results are stored in a separate point cloud. | |
| void | applyFilter (std::vector< int > &indices) |
| Filtered results are indexed by an indices array. | |
| void | applyFilterIndices (std::vector< int > &indices) |
| Filtered results are indexed by an indices array. | |
Private Attributes | |
| std::string | filter_field_name_ |
| The name of the field that will be used for filtering. | |
| float | filter_limit_max_ |
| The maximum allowed field value (default = FLT_MIN). | |
| float | filter_limit_min_ |
| The minimum allowed field value (default = FLT_MIN). | |
Detailed Description
template<typename PointT>
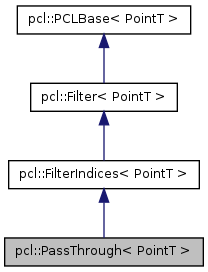
class pcl::PassThrough< PointT >
PassThrough passes points in a cloud based on constraints for one particular field of the point type.
Iterates through the entire input once, automatically filtering non-finite points and the points outside the interval specified by setFilterLimits(), which applies only to the field specified by setFilterFieldName().
Usage example:
pcl::PassThrough<PointType> ptfilter (true); // Initializing with true will allow us to extract the removed indices ptfilter.setInputCloud (cloud_in); ptfilter.setFilterFieldName ("x"); ptfilter.setFilterLimits (0.0, 1000.0); ptfilter.filter (*indices_x); // The indices_x array indexes all points of cloud_in that have x between 0.0 and 1000.0 indices_rem = ptfilter.getRemovedIndices (); // The indices_rem array indexes all points of cloud_in that have x smaller than 0.0 or larger than 1000.0 // and also indexes all non-finite points of cloud_in ptfilter.setIndices (indices_x); ptfilter.setFilterFieldName ("z"); ptfilter.setFilterLimits (-10.0, 10.0); ptfilter.setNegative (true); ptfilter.filter (*indices_xz); // The indices_xz array indexes all points of cloud_in that have x between 0.0 and 1000.0 and z larger than 10.0 or smaller than -10.0 ptfilter.setIndices (indices_xz); ptfilter.setFilterFieldName ("intensity"); ptfilter.setFilterLimits (FLT_MIN, 0.5); ptfilter.setNegative (false); ptfilter.filter (*cloud_out); // The resulting cloud_out contains all points of cloud_in that are finite and have: // x between 0.0 and 1000.0, z larger than 10.0 or smaller than -10.0 and intensity smaller than 0.5.
Definition at line 80 of file passthrough.h.
Member Typedef Documentation
| typedef boost::shared_ptr< const PassThrough<PointT> > pcl::PassThrough< PointT >::ConstPtr |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 91 of file passthrough.h.
typedef pcl::traits::fieldList<PointT>::type pcl::PassThrough< PointT >::FieldList [protected] |
Definition at line 86 of file passthrough.h.
typedef FilterIndices<PointT>::PointCloud pcl::PassThrough< PointT >::PointCloud [protected] |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 83 of file passthrough.h.
typedef PointCloud::ConstPtr pcl::PassThrough< PointT >::PointCloudConstPtr [protected] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 85 of file passthrough.h.
typedef PointCloud::Ptr pcl::PassThrough< PointT >::PointCloudPtr [protected] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 84 of file passthrough.h.
| typedef boost::shared_ptr< PassThrough<PointT> > pcl::PassThrough< PointT >::Ptr |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 90 of file passthrough.h.
Constructor & Destructor Documentation
| pcl::PassThrough< PointT >::PassThrough | ( | bool | extract_removed_indices = false | ) | [inline] |
Constructor.
- Parameters:
-
[in] extract_removed_indices Set to true if you want to be able to extract the indices of points being removed (default = false).
Definition at line 97 of file passthrough.h.
Member Function Documentation
| void pcl::PassThrough< PointT >::applyFilter | ( | PointCloud & | output | ) | [protected, virtual] |
Filtered results are stored in a separate point cloud.
- Parameters:
-
[out] output The resultant point cloud.
Implements pcl::Filter< PointT >.
Definition at line 48 of file passthrough.hpp.
| void pcl::PassThrough< PointT >::applyFilter | ( | std::vector< int > & | indices | ) | [inline, protected, virtual] |
Filtered results are indexed by an indices array.
- Parameters:
-
[out] indices The resultant indices.
Implements pcl::FilterIndices< PointT >.
Definition at line 200 of file passthrough.h.
| void pcl::PassThrough< PointT >::applyFilterIndices | ( | std::vector< int > & | indices | ) | [protected] |
Filtered results are indexed by an indices array.
- Parameters:
-
[out] indices The resultant indices.
Definition at line 74 of file passthrough.hpp.
| std::string const pcl::PassThrough< PointT >::getFilterFieldName | ( | ) | [inline] |
Retrieve the name of the field to be used for filtering data.
- Returns:
- The name of the field that will be used for filtering.
Definition at line 120 of file passthrough.h.
| void pcl::PassThrough< PointT >::getFilterLimits | ( | float & | limit_min, |
| float & | limit_max | ||
| ) | [inline] |
Get the numerical limits for the field for filtering data.
- Parameters:
-
[out] limit_min The minimum allowed field value (default = FLT_MIN). [out] limit_max The maximum allowed field value (default = FLT_MAX).
Definition at line 142 of file passthrough.h.
| void pcl::PassThrough< PointT >::getFilterLimitsNegative | ( | bool & | limit_negative | ) | [inline] |
Get whether the data outside the interval (min/max) is to be returned (true) or inside (false).
- Warning:
- This method will be removed in the future. Use getNegative() instead.
- Parameters:
-
[out] limit_negative true if data outside the interval [min; max] is to be returned, false otherwise
Definition at line 164 of file passthrough.h.
| bool pcl::PassThrough< PointT >::getFilterLimitsNegative | ( | ) | [inline] |
Get whether the data outside the interval (min/max) is to be returned (true) or inside (false).
- Warning:
- This method will be removed in the future. Use getNegative() instead.
- Returns:
- true if data outside the interval [min; max] is to be returned, false otherwise
Definition at line 174 of file passthrough.h.
| void pcl::PassThrough< PointT >::setFilterFieldName | ( | const std::string & | field_name | ) | [inline] |
Provide the name of the field to be used for filtering data.
In conjunction with setFilterLimits(), points having values outside this interval for this field will be discarded.
- Parameters:
-
[in] field_name The name of the field that will be used for filtering.
Definition at line 111 of file passthrough.h.
| void pcl::PassThrough< PointT >::setFilterLimits | ( | const float & | limit_min, |
| const float & | limit_max | ||
| ) | [inline] |
Set the numerical limits for the field for filtering data.
In conjunction with setFilterFieldName(), points having values outside this interval for this field will be discarded.
- Parameters:
-
[in] limit_min The minimum allowed field value (default = FLT_MIN). [in] limit_max The maximum allowed field value (default = FLT_MAX).
Definition at line 131 of file passthrough.h.
| void pcl::PassThrough< PointT >::setFilterLimitsNegative | ( | const bool | limit_negative | ) | [inline] |
Set to true if we want to return the data outside the interval specified by setFilterLimits (min, max) Default: false.
- Warning:
- This method will be removed in the future. Use setNegative() instead.
- Parameters:
-
[in] limit_negative return data inside the interval (false) or outside (true)
Definition at line 154 of file passthrough.h.
Member Data Documentation
std::string pcl::PassThrough< PointT >::filter_field_name_ [private] |
The name of the field that will be used for filtering.
Definition at line 213 of file passthrough.h.
float pcl::PassThrough< PointT >::filter_limit_max_ [private] |
The maximum allowed field value (default = FLT_MIN).
Definition at line 219 of file passthrough.h.
float pcl::PassThrough< PointT >::filter_limit_min_ [private] |
The minimum allowed field value (default = FLT_MIN).
Definition at line 216 of file passthrough.h.
The documentation for this class was generated from the following files: