FileGrabber provides a container-style interface for grabbers which operate on fixed-size input. More...
#include <file_grabber.h>
Public Member Functions | |
| virtual const boost::shared_ptr< const pcl::PointCloud< PointT > > | at (size_t idx) const |
| at Returns the idx-th cloud in the dataset, with bounds checking | |
| virtual const boost::shared_ptr< const pcl::PointCloud< PointT > > | operator[] (size_t idx) const =0 |
| operator[] Returns the idx-th cloud in the dataset, without bounds checking. Note that in the future, this could easily be modified to do caching | |
| virtual size_t | size () const =0 |
| size Returns the number of clouds currently loaded by the grabber | |
| virtual | ~FileGrabber () |
| Empty destructor. | |
Detailed Description
template<typename PointT>
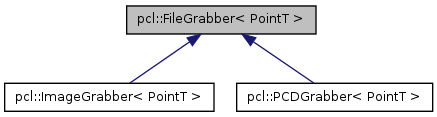
class pcl::FileGrabber< PointT >
FileGrabber provides a container-style interface for grabbers which operate on fixed-size input.
Definition at line 55 of file file_grabber.h.
Constructor & Destructor Documentation
| virtual pcl::FileGrabber< PointT >::~FileGrabber | ( | ) | [inline, virtual] |
Empty destructor.
Definition at line 60 of file file_grabber.h.
Member Function Documentation
| virtual const boost::shared_ptr< const pcl::PointCloud<PointT> > pcl::FileGrabber< PointT >::at | ( | size_t | idx | ) | const [inline, virtual] |
at Returns the idx-th cloud in the dataset, with bounds checking
- Parameters:
-
[in] idx The frame to load
Definition at line 77 of file file_grabber.h.
| virtual const boost::shared_ptr< const pcl::PointCloud<PointT> > pcl::FileGrabber< PointT >::operator[] | ( | size_t | idx | ) | const [pure virtual] |
operator[] Returns the idx-th cloud in the dataset, without bounds checking. Note that in the future, this could easily be modified to do caching
- Parameters:
-
[in] idx The frame to load
Implemented in pcl::ImageGrabber< PointT >, and pcl::PCDGrabber< PointT >.
| virtual size_t pcl::FileGrabber< PointT >::size | ( | ) | const [pure virtual] |
size Returns the number of clouds currently loaded by the grabber
Implemented in pcl::ImageGrabber< PointT >, and pcl::PCDGrabber< PointT >.
The documentation for this class was generated from the following file: