#include <iostream>#include <ros/ros.h>#include <sensor_msgs/Joy.h>#include <geometry_msgs/Twist.h>#include <std_msgs/Int32.h>#include "Utilities.hpp"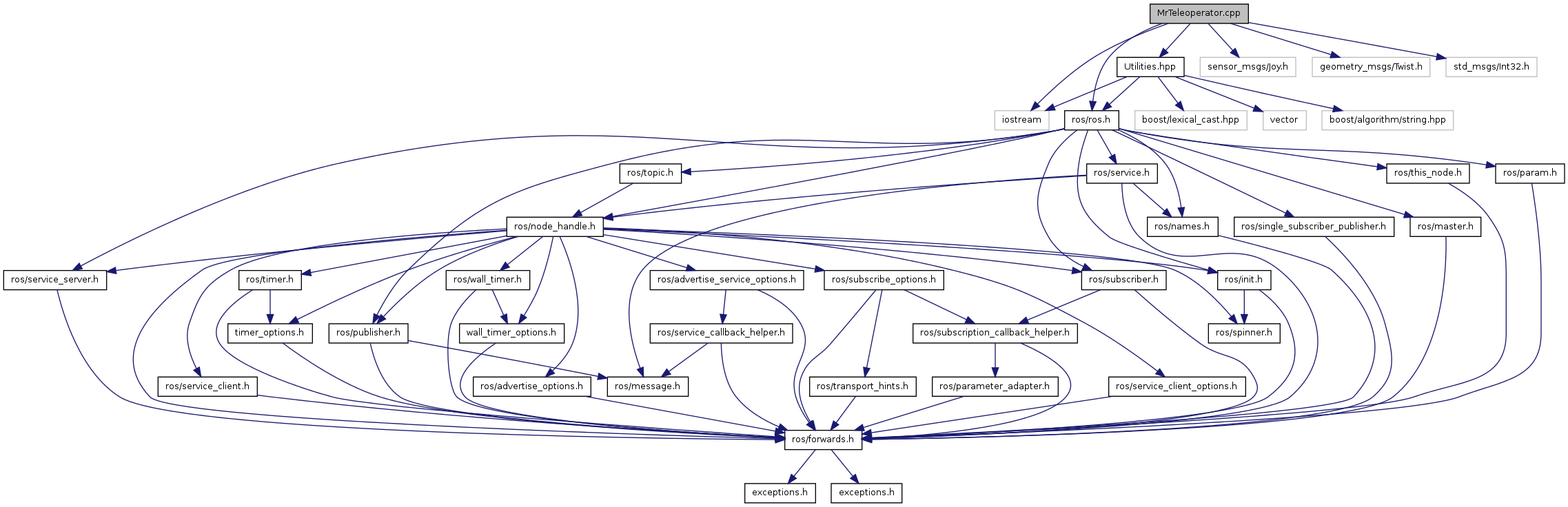
Go to the source code of this file.
Functions | |
| void | initPublishers (ros::NodeHandle &node, vector< string > topicNames) |
| void | joyCallback (const sensor_msgs::Joy::ConstPtr &joy) |
| int | main (int argc, char **argv) |
| void | onRobotSelect (const std_msgs::Int32 robotNumber) |
| void | publishVelocity (const ros::TimerEvent &event) |
Variables | |
| int32_t | _activeRobotNumber = 1 |
| ros::Subscriber | _activeRobotSubscriber |
| double | _aScale |
| bool | _deadmanPressed = false |
| bool | _enabled = false |
| ros::Subscriber | _joySubscriber |
| geometry_msgs::Twist | _lastVelocityMessage |
| double | _lScale |
| vector< ros::Publisher > | _publishers |
| ros::Timer | _publishTimer |
Function Documentation
| void initPublishers | ( | ros::NodeHandle & | node, |
| vector< string > | topicNames | ||
| ) |
Definition at line 50 of file MrTeleoperator.cpp.
| void joyCallback | ( | const sensor_msgs::Joy::ConstPtr & | joy | ) |
Definition at line 35 of file MrTeleoperator.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 71 of file MrTeleoperator.cpp.
| void onRobotSelect | ( | const std_msgs::Int32 | robotNumber | ) |
Definition at line 57 of file MrTeleoperator.cpp.
| void publishVelocity | ( | const ros::TimerEvent & | event | ) |
Definition at line 44 of file MrTeleoperator.cpp.
Variable Documentation
| int32_t _activeRobotNumber = 1 |
Definition at line 27 of file MrTeleoperator.cpp.
Definition at line 25 of file MrTeleoperator.cpp.
| double _aScale |
Definition at line 28 of file MrTeleoperator.cpp.
| bool _deadmanPressed = false |
Definition at line 31 of file MrTeleoperator.cpp.
| bool _enabled = false |
Definition at line 33 of file MrTeleoperator.cpp.
Definition at line 24 of file MrTeleoperator.cpp.
| geometry_msgs::Twist _lastVelocityMessage |
Definition at line 32 of file MrTeleoperator.cpp.
| double _lScale |
Definition at line 29 of file MrTeleoperator.cpp.
| vector<ros::Publisher> _publishers |
Definition at line 23 of file MrTeleoperator.cpp.
Definition at line 30 of file MrTeleoperator.cpp.