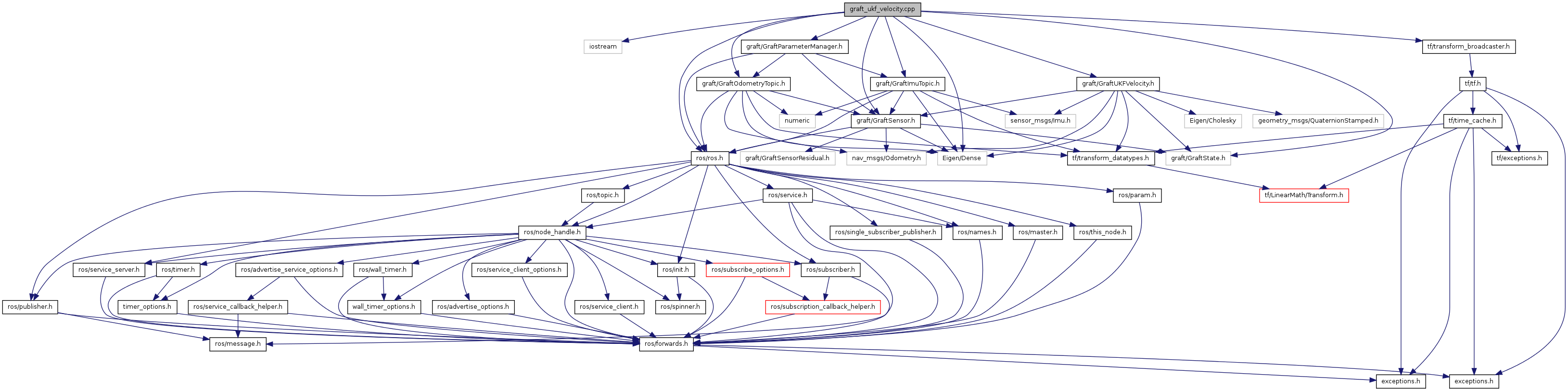
#include <iostream>#include <Eigen/Dense>#include <ros/ros.h>#include <graft/GraftParameterManager.h>#include <graft/GraftSensor.h>#include <graft/GraftOdometryTopic.h>#include <graft/GraftImuTopic.h>#include <graft/GraftUKFVelocity.h>#include <graft/GraftState.h>#include <tf/transform_broadcaster.h>
Include dependency graph for graft_ukf_velocity.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| void | publishTF (const nav_msgs::Odometry &msg) |
| void | timer_callback (const ros::TimerEvent &event) |
Variables | |
| boost::shared_ptr < tf::TransformBroadcaster > | broadcaster_ |
| std::string | child_frame_id_ |
| nav_msgs::Odometry | odom_ |
| ros::Publisher | odom_pub |
| std::string | parent_frame_id_ |
| bool | publish_tf_ |
| ros::Publisher | state_pub |
| GraftUKFVelocity | ukfv |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 113 of file graft_ukf_velocity.cpp.
| void publishTF | ( | const nav_msgs::Odometry & | msg | ) |
Definition at line 59 of file graft_ukf_velocity.cpp.
| void timer_callback | ( | const ros::TimerEvent & | event | ) |
Definition at line 73 of file graft_ukf_velocity.cpp.
Variable Documentation
| boost::shared_ptr<tf::TransformBroadcaster> broadcaster_ |
Definition at line 54 of file graft_ukf_velocity.cpp.
| std::string child_frame_id_ |
Definition at line 57 of file graft_ukf_velocity.cpp.
| nav_msgs::Odometry odom_ |
Definition at line 50 of file graft_ukf_velocity.cpp.
Definition at line 48 of file graft_ukf_velocity.cpp.
| std::string parent_frame_id_ |
Definition at line 56 of file graft_ukf_velocity.cpp.
| bool publish_tf_ |
Definition at line 53 of file graft_ukf_velocity.cpp.
Definition at line 47 of file graft_ukf_velocity.cpp.
Definition at line 45 of file graft_ukf_velocity.cpp.