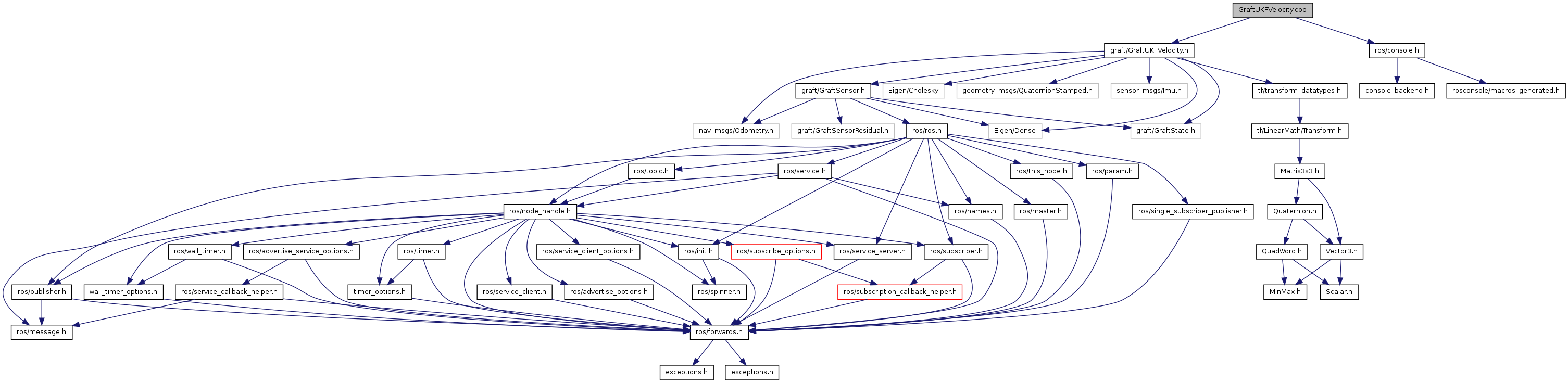
Include dependency graph for GraftUKFVelocity.cpp:
Go to the source code of this file.
Functions | |
| MatrixXd | addElementToColumnMatrix (const MatrixXd &mat, const double &element) |
| VectorXd | addElementToVector (const VectorXd &vec, const double &element) |
| void | clearMessages (std::vector< boost::shared_ptr< GraftSensor > > &topics) |
| MatrixXd | covarianceFromSigmaPoints (std::vector< MatrixXd > &sigma_points, MatrixXd &mean, MatrixXd process_noise, double n, double alpha, double beta, double lambda) |
| MatrixXd | crossCovariance (std::vector< MatrixXd > &sigma_points, MatrixXd &mean, std::vector< MatrixXd > &meas_sigma_points, MatrixXd &meas_mean, double alpha, double beta, double lambda) |
| std::vector< MatrixXd > | generateSigmaPoints (MatrixXd state, MatrixXd covariance, double lambda) |
| VectorXd | getMeasurements (const std::vector< boost::shared_ptr< GraftSensor > > &topics, const std::vector< MatrixXd > &predicted_sigma_points, std::vector< MatrixXd > &output_measurement_sigmas, MatrixXd &output_innovation_covariance) |
| MatrixXd | matrixSqrt (MatrixXd matrix) |
| MatrixXd | meanFromSigmaPoints (std::vector< MatrixXd > &sigma_points, double n, double lambda) |
| Combined covariancesFromSigmaPoints with crossCovariance | |
| graft::GraftState::ConstPtr | stateMsgFromMatrix (const MatrixXd &state) |
| MatrixXd | verticalConcatenate (MatrixXd &m, MatrixXd &n) |
Function Documentation
| MatrixXd addElementToColumnMatrix | ( | const MatrixXd & | mat, |
| const double & | element | ||
| ) |
Definition at line 160 of file GraftUKFVelocity.cpp.
| VectorXd addElementToVector | ( | const VectorXd & | vec, |
| const double & | element | ||
| ) |
Definition at line 154 of file GraftUKFVelocity.cpp.
| void clearMessages | ( | std::vector< boost::shared_ptr< GraftSensor > > & | topics | ) |
Definition at line 230 of file GraftUKFVelocity.cpp.
| MatrixXd covarianceFromSigmaPoints | ( | std::vector< MatrixXd > & | sigma_points, |
| MatrixXd & | mean, | ||
| MatrixXd | process_noise, | ||
| double | n, | ||
| double | alpha, | ||
| double | beta, | ||
| double | lambda | ||
| ) |
Definition at line 92 of file GraftUKFVelocity.cpp.
| MatrixXd crossCovariance | ( | std::vector< MatrixXd > & | sigma_points, |
| MatrixXd & | mean, | ||
| std::vector< MatrixXd > & | meas_sigma_points, | ||
| MatrixXd & | meas_mean, | ||
| double | alpha, | ||
| double | beta, | ||
| double | lambda | ||
| ) |
Definition at line 102 of file GraftUKFVelocity.cpp.
| std::vector<MatrixXd > generateSigmaPoints | ( | MatrixXd | state, |
| MatrixXd | covariance, | ||
| double | lambda | ||
| ) |
Definition at line 60 of file GraftUKFVelocity.cpp.
| VectorXd getMeasurements | ( | const std::vector< boost::shared_ptr< GraftSensor > > & | topics, |
| const std::vector< MatrixXd > & | predicted_sigma_points, | ||
| std::vector< MatrixXd > & | output_measurement_sigmas, | ||
| MatrixXd & | output_innovation_covariance | ||
| ) |
Definition at line 172 of file GraftUKFVelocity.cpp.
| MatrixXd matrixSqrt | ( | MatrixXd | matrix | ) |
< Make a reference? MatrixXd vs templated....
Definition at line 55 of file GraftUKFVelocity.cpp.
| MatrixXd meanFromSigmaPoints | ( | std::vector< MatrixXd > & | sigma_points, |
| double | n, | ||
| double | lambda | ||
| ) |
Combined covariancesFromSigmaPoints with crossCovariance
Definition at line 81 of file GraftUKFVelocity.cpp.
| graft::GraftState::ConstPtr stateMsgFromMatrix | ( | const MatrixXd & | state | ) |
Definition at line 122 of file GraftUKFVelocity.cpp.
| MatrixXd verticalConcatenate | ( | MatrixXd & | m, |
| MatrixXd & | n | ||
| ) |
Definition at line 48 of file GraftUKFVelocity.cpp.