#include <Factor.h>
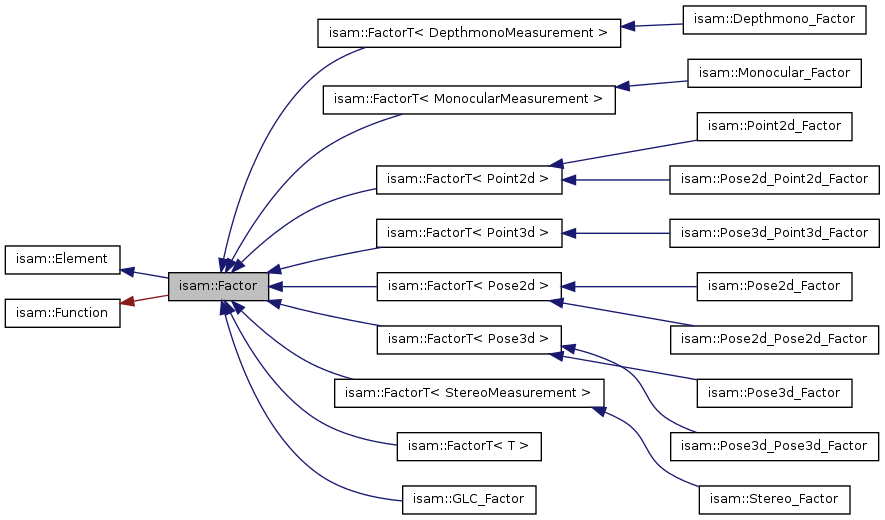
Inheritance diagram for isam::Factor:
Public Member Functions | |
| virtual Eigen::VectorXd | basic_error (Selector s=ESTIMATE) const =0 |
| bool | deleted () const |
| virtual Eigen::VectorXd | error (Selector s=ESTIMATE) const |
| Eigen::VectorXd | evaluate () const |
| Factor (const char *name, int dim, const Noise &noise) | |
| virtual void | initialize ()=0 |
| virtual void | initialize_internal () |
| virtual Jacobian | jacobian () |
| virtual Jacobian | jacobian_internal (bool force_numerical) |
| void | mark_deleted () |
| std::vector< Node * > & | nodes () |
| int | num_measurements () const |
| virtual void | set_cost_function (cost_func_t *ptr) |
| virtual const Eigen::MatrixXd & | sqrtinf () const |
| virtual void | write (std::ostream &out) const |
| virtual | ~Factor () |
Protected Attributes | |
| std::vector< Node * > | _nodes |
| const Noise | _noise |
Private Member Functions | |
| virtual Eigen::MatrixXd | numerical_jacobian () |
Private Attributes | |
| bool | _deleted |
| cost_func_t * | ptr_cost_func |
Static Private Attributes | |
| static int | _next_id = 0 |
Friends | |
| std::ostream & | operator<< (std::ostream &output, const Factor &e) |
Detailed Description
Constructor & Destructor Documentation
| isam::Factor::Factor | ( | const char * | name, |
| int | dim, | ||
| const Noise & | noise | ||
| ) | [inline] |
| virtual isam::Factor::~Factor | ( | ) | [inline, virtual] |
Member Function Documentation
| virtual Eigen::VectorXd isam::Factor::basic_error | ( | Selector | s = ESTIMATE | ) | const [pure virtual] |
| bool isam::Factor::deleted | ( | ) | const [inline] |
| virtual Eigen::VectorXd isam::Factor::error | ( | Selector | s = ESTIMATE | ) | const [inline, virtual] |
| Eigen::VectorXd isam::Factor::evaluate | ( | ) | const [inline, virtual] |
Implements isam::Function.
| virtual void isam::Factor::initialize | ( | ) | [pure virtual] |
| virtual void isam::Factor::initialize_internal | ( | ) | [inline, virtual] |
| virtual Jacobian isam::Factor::jacobian | ( | ) | [inline, virtual] |
Reimplemented in isam::Pose2d_Point2d_Factor, isam::Pose2d_Pose2d_Factor, isam::GLC_Factor, and isam::Pose2d_Factor.
| virtual Jacobian isam::Factor::jacobian_internal | ( | bool | force_numerical | ) | [inline, virtual] |
| void isam::Factor::mark_deleted | ( | ) | [inline] |
| std::vector<Node*>& isam::Factor::nodes | ( | ) | [inline, virtual] |
Implements isam::Function.
| int isam::Factor::num_measurements | ( | ) | const [inline, virtual] |
Implements isam::Function.
| virtual Eigen::MatrixXd isam::Factor::numerical_jacobian | ( | ) | [inline, private, virtual] |
| virtual void isam::Factor::set_cost_function | ( | cost_func_t * | ptr | ) | [inline, virtual] |
| virtual const Eigen::MatrixXd& isam::Factor::sqrtinf | ( | ) | const [inline, virtual] |
| virtual void isam::Factor::write | ( | std::ostream & | out | ) | const [inline, virtual] |
Reimplemented from isam::Element.
Reimplemented in isam::FactorT< T >, isam::FactorT< Point2d >, isam::FactorT< Point3d >, isam::FactorT< DepthmonoMeasurement >, isam::FactorT< MonocularMeasurement >, isam::FactorT< StereoMeasurement >, isam::FactorT< Pose3d >, isam::FactorT< Pose2d >, and isam::GLC_Factor.
Friends And Related Function Documentation
| std::ostream& operator<< | ( | std::ostream & | output, |
| const Factor & | e | ||
| ) | [friend] |
Member Data Documentation
bool isam::Factor::_deleted [private] |
int isam::Factor::_next_id = 0 [static, private] |
std::vector<Node*> isam::Factor::_nodes [protected] |
const Noise isam::Factor::_noise [protected] |
cost_func_t* isam::Factor::ptr_cost_func [private] |
The documentation for this class was generated from the following files: