#include <sr_generic_tactile_sensor.hpp>
Public Member Functions | |
| virtual double | get_touch_data ()=0 |
| void | publish_current_values () |
| SrGenericTactileSensor (std::string name, std::string touch_name) | |
| ~SrGenericTactileSensor () | |
Private Attributes | |
| std_msgs::Float64 | msg_touch |
| ros::NodeHandle | n_tilde |
| ros::Publisher | touch_pub |
| std::string | touch_sensor_name |
Detailed Description
Definition at line 43 of file sr_generic_tactile_sensor.hpp.
Constructor & Destructor Documentation
| shadowrobot::SrGenericTactileSensor::SrGenericTactileSensor | ( | std::string | name, |
| std::string | touch_name | ||
| ) |
Definition at line 35 of file sr_generic_tactile_sensor.cpp.
Definition at line 44 of file sr_generic_tactile_sensor.cpp.
Member Function Documentation
| virtual double shadowrobot::SrGenericTactileSensor::get_touch_data | ( | ) | [pure virtual] |
Needs to be implemented in the inheriting class
- Returns:
- the pressure value
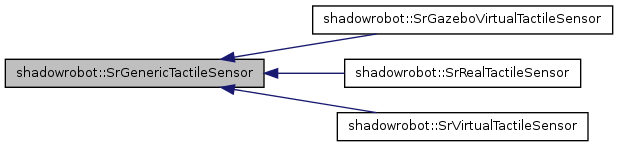
Implemented in shadowrobot::SrVirtualTactileSensor, shadowrobot::SrGazeboVirtualTactileSensor, and shadowrobot::SrRealTactileSensor.
publish the current values to the correct ros topics
Definition at line 47 of file sr_generic_tactile_sensor.cpp.
Member Data Documentation
std_msgs::Float64 shadowrobot::SrGenericTactileSensor::msg_touch [private] |
Definition at line 66 of file sr_generic_tactile_sensor.hpp.
Definition at line 64 of file sr_generic_tactile_sensor.hpp.
Definition at line 63 of file sr_generic_tactile_sensor.hpp.
std::string shadowrobot::SrGenericTactileSensor::touch_sensor_name [private] |
Definition at line 65 of file sr_generic_tactile_sensor.hpp.
The documentation for this class was generated from the following files: