#include <sr_muscle_robot_lib.hpp>
Public Member Functions | |
| void | add_diagnostics (std::vector< diagnostic_msgs::DiagnosticStatus > &vec, diagnostic_updater::DiagnosticStatusWrapper &d) |
| void | build_command (CommandType *command) |
| void | reinitialize_motors () |
| SrMuscleRobotLib (pr2_hardware_interface::HardwareInterface *hw) | |
| void | update (StatusType *status_data) |
| virtual | ~SrMuscleRobotLib () |
Public Attributes | |
| operation_mode::device_update_state::DeviceUpdateState | muscle_current_state |
| Current update state of the motor (initialization, operation..) | |
Protected Member Functions | |
| bool | check_muscle_driver_data_received_flags () |
| unsigned int | get_muscle_pressure (int muscle_driver_id, int muscle_id, StatusType *status_data) |
| std::vector< std::pair < std::string, bool > > | humanize_flags (int flag) |
| void | init_timer_callback (const ros::TimerEvent &event) |
| virtual void | initialize (std::vector< std::string > joint_names, std::vector< int > actuator_ids, std::vector< shadow_joints::JointToSensor > joint_to_sensors, std::vector< sr_actuator::SrGenericActuator * > actuators)=0 |
| void | read_additional_muscle_data (boost::ptr_vector< shadow_joints::Joint >::iterator joint_tmp, StatusType *status_data) |
| void | read_muscle_driver_data (boost::ptr_vector< shadow_joints::MuscleDriver >::iterator muscle_driver_tmp, StatusType *status_data) |
| virtual shadow_joints::CalibrationMap | read_pressure_calibration () |
| void | set_muscle_driver_data_received_flags (unsigned int msg_type, int muscle_driver_id) |
| void | set_valve_demand (uint8_t *muscle_data_byte_to_set, int8_t valve_value, uint8_t shifting_index) |
Protected Attributes | |
| ros::Timer | check_init_timeout_timer |
| std::map< unsigned int, unsigned int > | from_muscle_driver_data_received_flags_ |
| ros::Duration | init_max_duration |
| boost::shared_ptr< boost::mutex > | lock_init_timeout_ |
| A mutual exclusion object to ensure that the intitialization timeout event does work without threading issues. | |
| boost::ptr_vector < shadow_joints::MuscleDriver > | muscle_drivers_vector_ |
| std::vector < generic_updater::UpdateConfig > | muscle_update_rate_configs_vector |
| The update rate for each muscle information. | |
| boost::shared_ptr < generic_updater::MuscleUpdater < CommandType > > | muscle_updater_ |
| shadow_joints::CalibrationMap | pressure_calibration_map_ |
| The map used to calibrate each pressure sensor. | |
| boost::shared_ptr < shadow_robot::JointCalibration > | pressure_calibration_tmp_ |
| A temporary calibration for a given joint. | |
| std::queue< short, std::list < short > > | reset_muscle_driver_queue |
| contains a queue of muscle driver indexes to reset | |
Static Protected Attributes | |
| static const double | timeout = 5.0 |
Detailed Description
template<class StatusType, class CommandType>
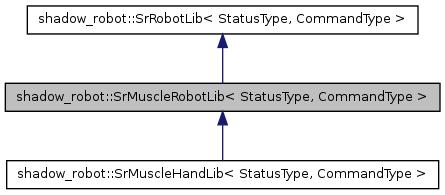
class shadow_robot::SrMuscleRobotLib< StatusType, CommandType >
Definition at line 40 of file sr_muscle_robot_lib.hpp.
Constructor & Destructor Documentation
| shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::SrMuscleRobotLib | ( | pr2_hardware_interface::HardwareInterface * | hw | ) |
Definition at line 48 of file sr_muscle_robot_lib.cpp.
| virtual shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::~SrMuscleRobotLib | ( | ) | [inline, virtual] |
Definition at line 44 of file sr_muscle_robot_lib.hpp.
Member Function Documentation
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::add_diagnostics | ( | std::vector< diagnostic_msgs::DiagnosticStatus > & | vec, |
| diagnostic_updater::DiagnosticStatusWrapper & | d | ||
| ) | [virtual] |
This function adds the diagnostics for the hand to the multi diagnostic status published in sr06.cpp.
Implements shadow_robot::SrRobotLib< StatusType, CommandType >.
Definition at line 326 of file sr_muscle_robot_lib.cpp.
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::build_command | ( | CommandType * | command | ) | [virtual] |
Builds a motor command: either send a torque demand or a configuration demand if one is waiting.
- Parameters:
-
command The command we're building.
Implements shadow_robot::SrRobotLib< StatusType, CommandType >.
Definition at line 169 of file sr_muscle_robot_lib.cpp.
| bool shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::check_muscle_driver_data_received_flags | ( | ) | [inline, protected] |
Definition at line 715 of file sr_muscle_robot_lib.cpp.
| unsigned int shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::get_muscle_pressure | ( | int | muscle_driver_id, |
| int | muscle_id, | ||
| StatusType * | status_data | ||
| ) | [protected] |
Decodes the pressure data for a certain muscle in a certain muscle driver from the status data structure
Definition at line 568 of file sr_muscle_robot_lib.cpp.
| std::vector< std::pair< std::string, bool > > shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::humanize_flags | ( | int | flag | ) | [protected] |
Transforms the incoming flag as a human readable vector of strings.
- Parameters:
-
flag incoming flag.
- Returns:
- human readable flags.
Definition at line 728 of file sr_muscle_robot_lib.cpp.
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::init_timer_callback | ( | const ros::TimerEvent & | event | ) | [protected] |
Calback for the timer that controls the timeout for the muscle initialization period
Definition at line 768 of file sr_muscle_robot_lib.cpp.
| virtual void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::initialize | ( | std::vector< std::string > | joint_names, |
| std::vector< int > | actuator_ids, | ||
| std::vector< shadow_joints::JointToSensor > | joint_to_sensors, | ||
| std::vector< sr_actuator::SrGenericActuator * > | actuators | ||
| ) | [protected, pure virtual] |
Initializes the hand library with the needed values.
- Parameters:
-
joint_names A vector containing all the joint names. actuator_ids A vector containing the corresponding actuator ids. joint_to_sensors A vector mapping the joint to the sensor index we read from the palm. actuators A vector containing the actuators for the different joints.
Implements shadow_robot::SrRobotLib< StatusType, CommandType >.
Implemented in shadow_robot::SrMuscleHandLib< StatusType, CommandType >.
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::read_additional_muscle_data | ( | boost::ptr_vector< shadow_joints::Joint >::iterator | joint_tmp, |
| StatusType * | status_data | ||
| ) | [protected] |
Read additional data from the latest message and stores it into the joints_vector.
- Parameters:
-
joint_tmp The joint we want to read the data for. status_data The status information that comes from the robot
Definition at line 448 of file sr_muscle_robot_lib.cpp.
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::read_muscle_driver_data | ( | boost::ptr_vector< shadow_joints::MuscleDriver >::iterator | muscle_driver_tmp, |
| StatusType * | status_data | ||
| ) | [protected] |
Read additional data from the latest message and stores it into the joints_vector.
- Parameters:
-
muscle_driver_tmp The muscle we want to read the data for. status_data The status information that comes from the robot
Definition at line 622 of file sr_muscle_robot_lib.cpp.
| shadow_joints::CalibrationMap shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::read_pressure_calibration | ( | ) | [protected, virtual] |
Reads the calibration from the parameter server.
- Returns:
- a calibration map
Definition at line 70 of file sr_muscle_robot_lib.cpp.
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::reinitialize_motors | ( | ) |
Initiates the process to retrieve the initialization information from the motors
Definition at line 752 of file sr_muscle_robot_lib.cpp.
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::set_muscle_driver_data_received_flags | ( | unsigned int | msg_type, |
| int | muscle_driver_id | ||
| ) | [inline, protected] |
Definition at line 702 of file sr_muscle_robot_lib.cpp.
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::set_valve_demand | ( | uint8_t * | muscle_data_byte_to_set, |
| int8_t | valve_value, | ||
| uint8_t | shifting_index | ||
| ) | [inline, protected] |
Encodes the required valve value in a 4 bit 2's complement format, and writes it in the most significant or less significant half of the pointed byte (muscle_data_byte_to_set) depending on the value of shifting_index.
- Parameters:
-
muscle_data_byte_to_set pointer to the byte where we want to write the result valve_value the integer value of the valve demand shifting_index if 0, valve is written on the 4 MSB of muscle_data_byte_to_set, if 1 on the 4 LSB
Definition at line 296 of file sr_muscle_robot_lib.cpp.
| void shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::update | ( | StatusType * | status_data | ) | [virtual] |
This function is called each time a new etherCAT message is received in the sr06.cpp driver. It updates the joints_vector, updating the different values, computing the calibrated joint positions, etc... It also updates the tactile sensors values.
- Parameters:
-
status_data the received etherCAT message
Implements shadow_robot::SrRobotLib< StatusType, CommandType >.
Definition at line 113 of file sr_muscle_robot_lib.cpp.
Member Data Documentation
ros::Timer shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::check_init_timeout_timer [protected] |
Definition at line 190 of file sr_muscle_robot_lib.hpp.
std::map<unsigned int, unsigned int> shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::from_muscle_driver_data_received_flags_ [protected] |
A vector to store information about a certain message from the muscle driver. First in the pair is FROM_MUSCLE_DATA_TYPE second in the pair is a bit mask where the bit in position id_muscle_driver tells if this data has been received from that muscle driver It will only contain those FROM_MUSCLE_DATA_TYPE that are considered as initialization parameters
Definition at line 187 of file sr_muscle_robot_lib.hpp.
ros::Duration shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::init_max_duration [protected] |
Definition at line 192 of file sr_muscle_robot_lib.hpp.
boost::shared_ptr<boost::mutex> shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::lock_init_timeout_ [protected] |
A mutual exclusion object to ensure that the intitialization timeout event does work without threading issues.
Definition at line 195 of file sr_muscle_robot_lib.hpp.
| operation_mode::device_update_state::DeviceUpdateState shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::muscle_current_state |
Current update state of the motor (initialization, operation..)
Definition at line 78 of file sr_muscle_robot_lib.hpp.
boost::ptr_vector<shadow_joints::MuscleDriver> shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::muscle_drivers_vector_ [protected] |
Definition at line 162 of file sr_muscle_robot_lib.hpp.
std::vector<generic_updater::UpdateConfig> shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::muscle_update_rate_configs_vector [protected] |
The update rate for each muscle information.
Definition at line 179 of file sr_muscle_robot_lib.hpp.
boost::shared_ptr<generic_updater::MuscleUpdater<CommandType> > shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::muscle_updater_ [protected] |
The motor updater is used to create a correct command to send to the motor. It's build_command() is called each time the SR06::packCommand() is called.
Definition at line 170 of file sr_muscle_robot_lib.hpp.
shadow_joints::CalibrationMap shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::pressure_calibration_map_ [protected] |
The map used to calibrate each pressure sensor.
Definition at line 96 of file sr_muscle_robot_lib.hpp.
boost::shared_ptr<shadow_robot::JointCalibration> shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::pressure_calibration_tmp_ [protected] |
A temporary calibration for a given joint.
Definition at line 98 of file sr_muscle_robot_lib.hpp.
std::queue<short, std::list<short> > shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::reset_muscle_driver_queue [protected] |
contains a queue of muscle driver indexes to reset
Definition at line 174 of file sr_muscle_robot_lib.hpp.
const double shadow_robot::SrMuscleRobotLib< StatusType, CommandType >::timeout = 5.0 [static, protected] |
Definition at line 191 of file sr_muscle_robot_lib.hpp.
The documentation for this class was generated from the following files: