#include <iostream>#include <sstream>#include <cmath>#include "ros/ros.h"#include <tf/transform_broadcaster.h>#include "geometry_msgs/Twist.h"#include "nav_msgs/Odometry.h"#include "segway_rmpX/SegwayStatusStamped.h"#include "segwayrmp/segwayrmp.h"#include <boost/thread.hpp>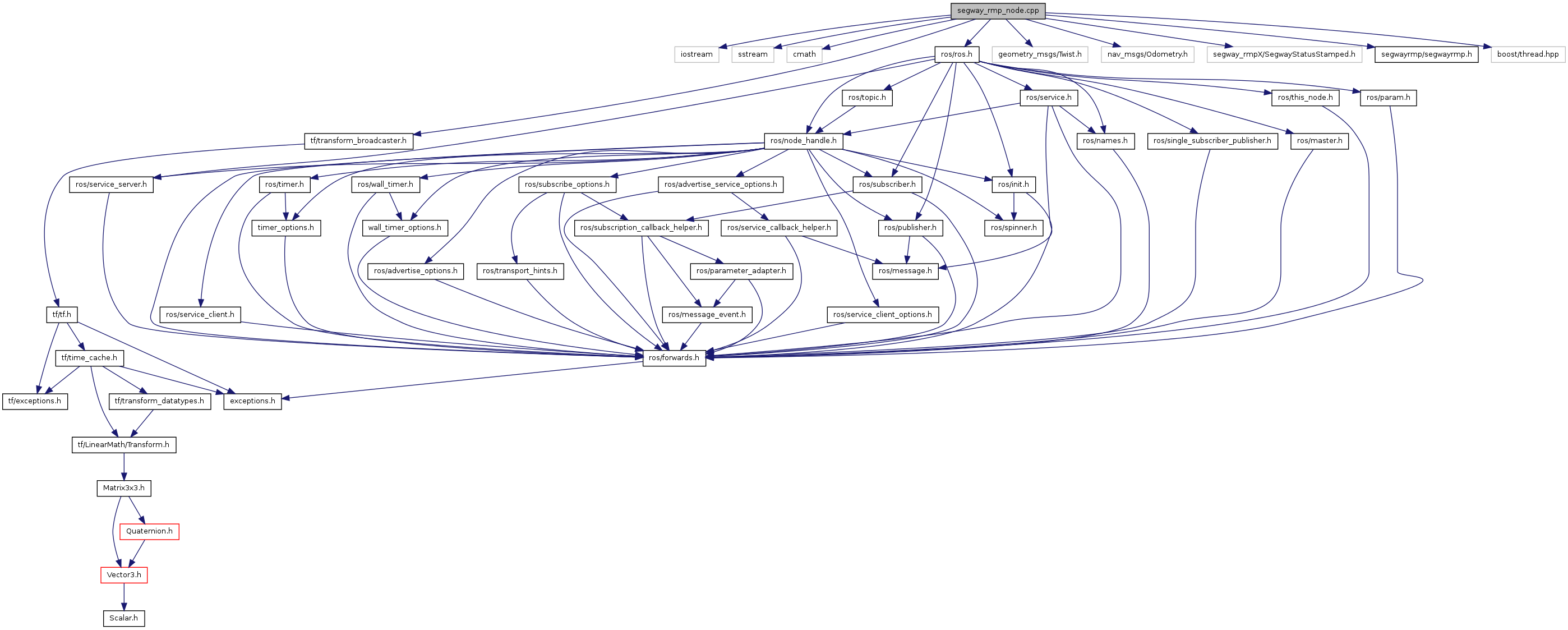
Go to the source code of this file.
Classes | |
| class | SegwayRMPNode |
Functions | |
| void | handleDebugMessages (const std::string &msg) |
| void | handleErrorMessages (const std::string &msg) |
| void | handleInfoMessages (const std::string &msg) |
| void | handleStatusWrapper (segwayrmp::SegwayStatus::Ptr &ss) |
| int | main (int argc, char **argv) |
Variables | |
| static double | degrees_to_radians = M_PI / 180.0 |
| static double | radians_to_degrees = 180.0 / M_PI |
| static SegwayRMPNode * | segwayrmp_node_instance |
| void handleDebugMessages | ( | const std::string & | msg | ) |
Definition at line 46 of file segway_rmp_node.cpp.
| void handleErrorMessages | ( | const std::string & | msg | ) |
Definition at line 48 of file segway_rmp_node.cpp.
| void handleInfoMessages | ( | const std::string & | msg | ) |
Definition at line 47 of file segway_rmp_node.cpp.
| void handleStatusWrapper | ( | segwayrmp::SegwayStatus::Ptr & | ss | ) |
Definition at line 535 of file segway_rmp_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 539 of file segway_rmp_node.cpp.
double degrees_to_radians = M_PI / 180.0 [static] |
Definition at line 43 of file segway_rmp_node.cpp.
double radians_to_degrees = 180.0 / M_PI [static] |
Definition at line 42 of file segway_rmp_node.cpp.
SegwayRMPNode* segwayrmp_node_instance [static] |
Definition at line 38 of file segway_rmp_node.cpp.

