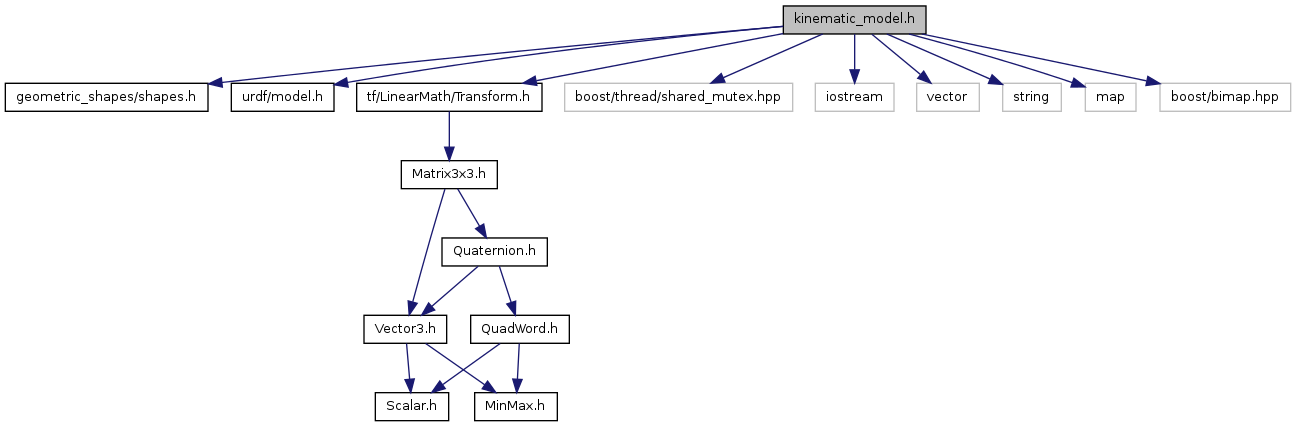
#include <geometric_shapes/shapes.h>#include <urdf/model.h>#include <tf/LinearMath/Transform.h>#include <boost/thread/shared_mutex.hpp>#include <iostream>#include <vector>#include <string>#include <map>#include <boost/bimap.hpp>
Include dependency graph for kinematic_model.h:
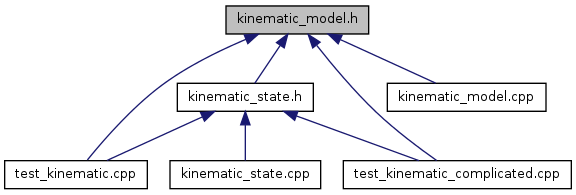
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.