A class capable of loading a robot model from the parameter server. More...
#include <collision_models.h>
Public Member Functions | |
| bool | addAttachedObject (const arm_navigation_msgs::AttachedCollisionObject &att) |
| bool | addAttachedObject (const std::string &object_name, const std::string &link_name, std::vector< shapes::Shape * > &shapes, const std::vector< tf::Transform > &poses, const std::vector< std::string > &touch_links, double padding) |
| bool | addStaticObject (const arm_navigation_msgs::CollisionObject &obj) |
| void | addStaticObject (const std::string &name, std::vector< shapes::Shape * > &shapes, const std::vector< tf::Transform > &poses, double padding) |
| bool | appendJointTrajectoryToPlanningSceneBag (const std::string &filename, const std::string &topic_name, const trajectory_msgs::JointTrajectory &traj) |
| bool | appendMotionPlanRequestToPlanningSceneBag (const std::string &filename, const std::string &topic_name, const arm_navigation_msgs::MotionPlanRequest &req) |
| void | applyLinkPaddingToCollisionSpace (const std::vector< arm_navigation_msgs::LinkPadding > &link_padding) |
| bool | applyOrderedCollisionOperationsToCollisionSpace (const arm_navigation_msgs::OrderedCollisionOperations &ord, bool print=false) |
| void | bodiesLock () const |
| void | bodiesUnlock () const |
| void | clearAllowedContacts () |
| CollisionModels (const std::string &description) | |
| CollisionModels (boost::shared_ptr< urdf::Model > urdf, planning_models::KinematicModel *kmodel, collision_space::EnvironmentModel *ode_collision_model_) | |
| bool | convertAttachedCollisionObjectToNewWorldFrame (const planning_models::KinematicState &state, arm_navigation_msgs::AttachedCollisionObject &att_obj) const |
| bool | convertAttachedObjectToStaticObject (const std::string &object_name, const std::string &link_name, const tf::Transform &link_pose) |
| bool | convertCollisionObjectToNewWorldFrame (const planning_models::KinematicState &state, arm_navigation_msgs::CollisionObject &obj) const |
| bool | convertConstraintsGivenNewWorldTransform (const planning_models::KinematicState &state, arm_navigation_msgs::Constraints &constraints, const std::string &opt_frame="") const |
| bool | convertPointGivenWorldTransform (const planning_models::KinematicState &state, const std::string &des_frame_id, const std_msgs::Header &header, const geometry_msgs::Point &point, geometry_msgs::PointStamped &ret_point) const |
| bool | convertPoseGivenWorldTransform (const planning_models::KinematicState &state, const std::string &des_frame_id, const std_msgs::Header &header, const geometry_msgs::Pose &pose, geometry_msgs::PoseStamped &ret_pose) const |
| bool | convertQuaternionGivenWorldTransform (const planning_models::KinematicState &state, const std::string &des_frame_id, const std_msgs::Header &header, const geometry_msgs::Quaternion &quat, geometry_msgs::QuaternionStamped &ret_quat) const |
| bool | convertStaticObjectToAttachedObject (const std::string &object_name, const std::string &link_name, const tf::Transform &link_pose, const std::vector< std::string > &touch_links) |
| void | deleteAllAttachedObjects (const std::string &link_name="") |
| void | deleteAllStaticObjects () |
| bool | deleteAttachedObject (const std::string &object_id, const std::string &link_name) |
| void | deleteStaticObject (const std::string &name) |
| bool | disableCollisionsForNonUpdatedLinks (const std::string &group_name, bool use_default=false) |
| void | getAllCollisionPointMarkers (const planning_models::KinematicState &state, visualization_msgs::MarkerArray &arr, const std_msgs::ColorRGBA &color, const ros::Duration &lifetime) |
| void | getAllCollisionsForState (const planning_models::KinematicState &state, std::vector< arm_navigation_msgs::ContactInformation > &contacts, unsigned int num_per_pair=1) |
| void | getAllCollisionSpaceObjectMarkers (const planning_models::KinematicState &state, visualization_msgs::MarkerArray &arr, const std::string &ns, const std_msgs::ColorRGBA &static_color, const std_msgs::ColorRGBA &attached_color, const ros::Duration &lifetime) |
| void | getAllEnvironmentCollisionsForObject (const std::string &object_name, std::vector< arm_navigation_msgs::ContactInformation > &contacts, unsigned int num_per_pair=1) |
| void | getAttachedCollisionObjectMarkers (const planning_models::KinematicState &state, visualization_msgs::MarkerArray &arr, const std::string &ns, const std_msgs::ColorRGBA &color, const ros::Duration &lifetime, const bool show_padded=false, const std::vector< std::string > *link_names=NULL) const |
| void | getAttachedCollisionObjectNames (std::vector< std::string > &a_strings) const |
| void | getCollisionMapAsMarkers (visualization_msgs::MarkerArray &arr, const std_msgs::ColorRGBA &color, const ros::Duration &lifetime) |
| const std::vector < tf::Transform > & | getCollisionMapPoses () const |
| const std::vector < shapes::Shape * > & | getCollisionMapShapes () const |
| void | getCollisionObjectNames (std::vector< std::string > &o_strings) const |
| const collision_space::EnvironmentModel * | getCollisionSpace () const |
| Return the instance of the constructed ODE collision model. | |
| void | getCollisionSpaceAllowedCollisions (arm_navigation_msgs::AllowedCollisionMatrix &matrix) const |
| void | getCollisionSpaceAttachedCollisionObjects (std::vector< arm_navigation_msgs::AttachedCollisionObject > &avec) const |
| void | getCollisionSpaceCollisionMap (arm_navigation_msgs::CollisionMap &cmap) const |
| void | getCollisionSpaceCollisionObjects (std::vector< arm_navigation_msgs::CollisionObject > &omap) const |
| const collision_space::EnvironmentModel::AllowedCollisionMatrix & | getCurrentAllowedCollisionMatrix () const |
| void | getCurrentLinkPadding (std::vector< arm_navigation_msgs::LinkPadding > &link_padding) |
| std::map< std::string, double > | getCurrentLinkPaddingMap () const |
| const collision_space::EnvironmentModel::AllowedCollisionMatrix & | getDefaultAllowedCollisionMatrix () const |
| const std::map< std::string, double > & | getDefaultLinkPaddingMap () const |
| double | getDefaultObjectPadding (void) const |
| void | getDefaultOrderedCollisionOperations (std::vector< arm_navigation_msgs::CollisionOperation > &self_collision) const |
| double | getDefaultPadding (void) const |
| Get the padding to be used for the robot parts when inserted in the collision space. | |
| double | getDefaultScale (void) const |
| Get the scaling to be used for the robot parts when inserted in the collision space. | |
| void | getGroupAndUpdatedJointMarkersGivenState (const planning_models::KinematicState &state, visualization_msgs::MarkerArray &arr, const std::string &group_name, const std_msgs::ColorRGBA &group_color, const std_msgs::ColorRGBA &updated_color, const ros::Duration &lifetime) const |
| void | getLastCollisionMap (arm_navigation_msgs::CollisionMap &cmap) const |
| const std::map< std::string, std::map< std::string, bodies::BodyVector * > > & | getLinkAttachedObjects () const |
| void | getPlanningSceneGivenState (const planning_models::KinematicState &state, arm_navigation_msgs::PlanningScene &scene) |
| void | getRobotMarkersGivenState (const planning_models::KinematicState &state, visualization_msgs::MarkerArray &arr, const std_msgs::ColorRGBA &color, const std::string &name, const ros::Duration &lifetime, const std::vector< std::string > *names=NULL, const double scale=1.0, const bool show_collision_models=true) const |
| void | getRobotPaddedMarkersGivenState (const planning_models::KinematicState &state, visualization_msgs::MarkerArray &arr, const std_msgs::ColorRGBA &color, const std::string &name, const ros::Duration &lifetime, const std::vector< std::string > *names=NULL) const |
| const std::map< std::string, geometry_msgs::TransformStamped > & | getSceneTransformMap () const |
| void | getStaticCollisionObjectMarkers (visualization_msgs::MarkerArray &arr, const std::string &ns, const std_msgs::ColorRGBA &color, const ros::Duration &lifetime) const |
| double | getTotalTrajectoryJointLength (planning_models::KinematicState &state, const trajectory_msgs::JointTrajectory &trajectory) const |
| bool | isJointTrajectoryValid (const arm_navigation_msgs::PlanningScene &planning_scene, const trajectory_msgs::JointTrajectory &trajectory, const arm_navigation_msgs::Constraints &goal_constraints, const arm_navigation_msgs::Constraints &path_constraints, arm_navigation_msgs::ArmNavigationErrorCodes &error_code, std::vector< arm_navigation_msgs::ArmNavigationErrorCodes > &trajectory_error_codes, const bool evaluate_entire_trajectory) |
| bool | isJointTrajectoryValid (planning_models::KinematicState &state, const trajectory_msgs::JointTrajectory &trajectory, const arm_navigation_msgs::Constraints &goal_constraints, const arm_navigation_msgs::Constraints &path_constraints, arm_navigation_msgs::ArmNavigationErrorCodes &error_code, std::vector< arm_navigation_msgs::ArmNavigationErrorCodes > &trajectory_error_codes, const bool evaluate_entire_trajectory) |
| bool | isKinematicStateInCollision (const planning_models::KinematicState &state) |
| bool | isKinematicStateInEnvironmentCollision (const planning_models::KinematicState &state) |
| bool | isKinematicStateInObjectCollision (const planning_models::KinematicState &state, const std::string &object_name) |
| bool | isKinematicStateInSelfCollision (const planning_models::KinematicState &state) |
| bool | isKinematicStateValid (const planning_models::KinematicState &state, const std::vector< std::string > &names, arm_navigation_msgs::ArmNavigationErrorCodes &error_code, const arm_navigation_msgs::Constraints goal_constraints, const arm_navigation_msgs::Constraints path_constraints, bool verbose=false) |
| bool | isObjectInCollision (const std::string &object_name) |
| bool | isPlanningSceneSet () const |
| bool | loadJointTrajectoriesInPlanningSceneBag (const std::string &filename, const std::string &topic_name, std::vector< trajectory_msgs::JointTrajectory > &traj_vec) |
| bool | loadMotionPlanRequestsInPlanningSceneBag (const std::string &filename, const std::string &topic_name, std::vector< arm_navigation_msgs::MotionPlanRequest > &motion_plan_reqs) |
| void | maskAndDeleteShapeVector (std::vector< shapes::Shape * > &shapes, std::vector< tf::Transform > &poses) |
| bool | readPlanningSceneBag (const std::string &filename, arm_navigation_msgs::PlanningScene &planning_scene) const |
| void | remaskCollisionMap () |
| void | revertAllowedCollisionToDefault () |
| void | revertCollisionSpacePaddingToDefault () |
| void | revertPlanningScene (planning_models::KinematicState *state) |
| bool | setAlteredAllowedCollisionMatrix (const collision_space::EnvironmentModel::AllowedCollisionMatrix &acm) |
| void | setCollisionMap (const arm_navigation_msgs::CollisionMap &map, bool mask_before_insertion=true) |
| void | setCollisionMap (std::vector< shapes::Shape * > &shapes, const std::vector< tf::Transform > &poses, bool mask_before_insertion=true) |
| planning_models::KinematicState * | setPlanningScene (const arm_navigation_msgs::PlanningScene &planning_scene) |
| bool | updateAttachedBodyPoses (const planning_models::KinematicState &state) |
| bool | updateAttachedBodyPosesForLink (const planning_models::KinematicState &state, const std::string &link_name) |
| void | writePlanningSceneBag (const std::string &filename, const arm_navigation_msgs::PlanningScene &planning_scene) const |
| virtual | ~CollisionModels (void) |
Protected Member Functions | |
| void | loadCollisionFromParamServer () |
| void | setupModelFromParamServer (collision_space::EnvironmentModel *model) |
Protected Attributes | |
| double | attached_padd_ |
| boost::recursive_mutex | bodies_lock_ |
| std::vector< double > | bounding_planes_ |
| std::vector< tf::Transform > | collision_map_poses_ |
| std::vector< shapes::Shape * > | collision_map_shapes_ |
| std::vector < arm_navigation_msgs::CollisionOperation > | default_collision_operations_ |
| double | default_padd_ |
| double | default_scale_ |
| std::map< std::string, std::map< std::string, bodies::BodyVector * > > | link_attached_objects_ |
| double | object_padd_ |
| collision_space::EnvironmentModel * | ode_collision_model_ |
| bool | planning_scene_set_ |
| std::map< std::string, geometry_msgs::TransformStamped > | scene_transform_map_ |
| std::map< std::string, bodies::BodyVector * > | static_object_map_ |
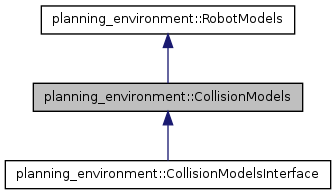
Detailed Description
A class capable of loading a robot model from the parameter server.
Definition at line 62 of file collision_models.h.
Constructor & Destructor Documentation
| planning_environment::CollisionModels::CollisionModels | ( | const std::string & | description | ) |
Definition at line 57 of file collision_models.cpp.
| planning_environment::CollisionModels::CollisionModels | ( | boost::shared_ptr< urdf::Model > | urdf, |
| planning_models::KinematicModel * | kmodel, | ||
| collision_space::EnvironmentModel * | ode_collision_model_ | ||
| ) |
Definition at line 63 of file collision_models.cpp.
| planning_environment::CollisionModels::~CollisionModels | ( | void | ) | [virtual] |
Definition at line 70 of file collision_models.cpp.
Member Function Documentation
| bool planning_environment::CollisionModels::addAttachedObject | ( | const arm_navigation_msgs::AttachedCollisionObject & | att | ) |
Definition at line 787 of file collision_models.cpp.
| bool planning_environment::CollisionModels::addAttachedObject | ( | const std::string & | object_name, |
| const std::string & | link_name, | ||
| std::vector< shapes::Shape * > & | shapes, | ||
| const std::vector< tf::Transform > & | poses, | ||
| const std::vector< std::string > & | touch_links, | ||
| double | padding | ||
| ) |
Definition at line 822 of file collision_models.cpp.
| bool planning_environment::CollisionModels::addStaticObject | ( | const arm_navigation_msgs::CollisionObject & | obj | ) |
Definition at line 627 of file collision_models.cpp.
| void planning_environment::CollisionModels::addStaticObject | ( | const std::string & | name, |
| std::vector< shapes::Shape * > & | shapes, | ||
| const std::vector< tf::Transform > & | poses, | ||
| double | padding | ||
| ) |
Definition at line 656 of file collision_models.cpp.
| bool planning_environment::CollisionModels::appendJointTrajectoryToPlanningSceneBag | ( | const std::string & | filename, |
| const std::string & | topic_name, | ||
| const trajectory_msgs::JointTrajectory & | traj | ||
| ) |
Definition at line 2220 of file collision_models.cpp.
| bool planning_environment::CollisionModels::appendMotionPlanRequestToPlanningSceneBag | ( | const std::string & | filename, |
| const std::string & | topic_name, | ||
| const arm_navigation_msgs::MotionPlanRequest & | req | ||
| ) |
Definition at line 2143 of file collision_models.cpp.
| void planning_environment::CollisionModels::applyLinkPaddingToCollisionSpace | ( | const std::vector< arm_navigation_msgs::LinkPadding > & | link_padding | ) |
Definition at line 1051 of file collision_models.cpp.
| bool planning_environment::CollisionModels::applyOrderedCollisionOperationsToCollisionSpace | ( | const arm_navigation_msgs::OrderedCollisionOperations & | ord, |
| bool | print = false |
||
| ) |
Definition at line 1082 of file collision_models.cpp.
| void planning_environment::CollisionModels::bodiesLock | ( | ) | const [inline] |
Definition at line 458 of file collision_models.h.
| void planning_environment::CollisionModels::bodiesUnlock | ( | ) | const [inline] |
Definition at line 462 of file collision_models.h.
| void planning_environment::CollisionModels::clearAllowedContacts | ( | ) | [inline] |
Definition at line 199 of file collision_models.h.
| bool planning_environment::CollisionModels::convertAttachedCollisionObjectToNewWorldFrame | ( | const planning_models::KinematicState & | state, |
| arm_navigation_msgs::AttachedCollisionObject & | att_obj | ||
| ) | const |
Definition at line 445 of file collision_models.cpp.
| bool planning_environment::CollisionModels::convertAttachedObjectToStaticObject | ( | const std::string & | object_name, |
| const std::string & | link_name, | ||
| const tf::Transform & | link_pose | ||
| ) |
Definition at line 1000 of file collision_models.cpp.
| bool planning_environment::CollisionModels::convertCollisionObjectToNewWorldFrame | ( | const planning_models::KinematicState & | state, |
| arm_navigation_msgs::CollisionObject & | obj | ||
| ) | const |
Definition at line 465 of file collision_models.cpp.
| bool planning_environment::CollisionModels::convertConstraintsGivenNewWorldTransform | ( | const planning_models::KinematicState & | state, |
| arm_navigation_msgs::Constraints & | constraints, | ||
| const std::string & | opt_frame = "" |
||
| ) | const |
Definition at line 485 of file collision_models.cpp.
| bool planning_environment::CollisionModels::convertPointGivenWorldTransform | ( | const planning_models::KinematicState & | state, |
| const std::string & | des_frame_id, | ||
| const std_msgs::Header & | header, | ||
| const geometry_msgs::Point & | point, | ||
| geometry_msgs::PointStamped & | ret_point | ||
| ) | const |
Definition at line 542 of file collision_models.cpp.
| bool planning_environment::CollisionModels::convertPoseGivenWorldTransform | ( | const planning_models::KinematicState & | state, |
| const std::string & | des_frame_id, | ||
| const std_msgs::Header & | header, | ||
| const geometry_msgs::Pose & | pose, | ||
| geometry_msgs::PoseStamped & | ret_pose | ||
| ) | const |
Conversion functions
Definition at line 355 of file collision_models.cpp.
| bool planning_environment::CollisionModels::convertQuaternionGivenWorldTransform | ( | const planning_models::KinematicState & | state, |
| const std::string & | des_frame_id, | ||
| const std_msgs::Header & | header, | ||
| const geometry_msgs::Quaternion & | quat, | ||
| geometry_msgs::QuaternionStamped & | ret_quat | ||
| ) | const |
Definition at line 564 of file collision_models.cpp.
| bool planning_environment::CollisionModels::convertStaticObjectToAttachedObject | ( | const std::string & | object_name, |
| const std::string & | link_name, | ||
| const tf::Transform & | link_pose, | ||
| const std::vector< std::string > & | touch_links | ||
| ) |
Definition at line 939 of file collision_models.cpp.
| void planning_environment::CollisionModels::deleteAllAttachedObjects | ( | const std::string & | link_name = "" | ) |
Definition at line 905 of file collision_models.cpp.
Definition at line 686 of file collision_models.cpp.
| bool planning_environment::CollisionModels::deleteAttachedObject | ( | const std::string & | object_id, |
| const std::string & | link_name | ||
| ) |
Definition at line 876 of file collision_models.cpp.
| void planning_environment::CollisionModels::deleteStaticObject | ( | const std::string & | name | ) |
Definition at line 672 of file collision_models.cpp.
| bool planning_environment::CollisionModels::disableCollisionsForNonUpdatedLinks | ( | const std::string & | group_name, |
| bool | use_default = false |
||
| ) |
Definition at line 1109 of file collision_models.cpp.
| void planning_environment::CollisionModels::getAllCollisionPointMarkers | ( | const planning_models::KinematicState & | state, |
| visualization_msgs::MarkerArray & | arr, | ||
| const std_msgs::ColorRGBA & | color, | ||
| const ros::Duration & | lifetime | ||
| ) |
Definition at line 1766 of file collision_models.cpp.
| void planning_environment::CollisionModels::getAllCollisionsForState | ( | const planning_models::KinematicState & | state, |
| std::vector< arm_navigation_msgs::ContactInformation > & | contacts, | ||
| unsigned int | num_per_pair = 1 |
||
| ) |
Definition at line 1392 of file collision_models.cpp.
| void planning_environment::CollisionModels::getAllCollisionSpaceObjectMarkers | ( | const planning_models::KinematicState & | state, |
| visualization_msgs::MarkerArray & | arr, | ||
| const std::string & | ns, | ||
| const std_msgs::ColorRGBA & | static_color, | ||
| const std_msgs::ColorRGBA & | attached_color, | ||
| const ros::Duration & | lifetime | ||
| ) |
Definition at line 1895 of file collision_models.cpp.
| void planning_environment::CollisionModels::getAllEnvironmentCollisionsForObject | ( | const std::string & | object_name, |
| std::vector< arm_navigation_msgs::ContactInformation > & | contacts, | ||
| unsigned int | num_per_pair = 1 |
||
| ) |
Definition at line 1432 of file collision_models.cpp.
| void planning_environment::CollisionModels::getAttachedCollisionObjectMarkers | ( | const planning_models::KinematicState & | state, |
| visualization_msgs::MarkerArray & | arr, | ||
| const std::string & | ns, | ||
| const std_msgs::ColorRGBA & | color, | ||
| const ros::Duration & | lifetime, | ||
| const bool | show_padded = false, |
||
| const std::vector< std::string > * | link_names = NULL |
||
| ) | const |
Definition at line 1814 of file collision_models.cpp.
| void planning_environment::CollisionModels::getAttachedCollisionObjectNames | ( | std::vector< std::string > & | a_strings | ) | const [inline] |
Definition at line 443 of file collision_models.h.
| void planning_environment::CollisionModels::getCollisionMapAsMarkers | ( | visualization_msgs::MarkerArray & | arr, |
| const std_msgs::ColorRGBA & | color, | ||
| const ros::Duration & | lifetime | ||
| ) |
Definition at line 1727 of file collision_models.cpp.
| const std::vector<tf::Transform>& planning_environment::CollisionModels::getCollisionMapPoses | ( | ) | const [inline] |
Definition at line 427 of file collision_models.h.
| const std::vector<shapes::Shape*>& planning_environment::CollisionModels::getCollisionMapShapes | ( | ) | const [inline] |
Definition at line 423 of file collision_models.h.
| void planning_environment::CollisionModels::getCollisionObjectNames | ( | std::vector< std::string > & | o_strings | ) | const [inline] |
Definition at line 431 of file collision_models.h.
| const collision_space::EnvironmentModel* planning_environment::CollisionModels::getCollisionSpace | ( | ) | const [inline] |
Return the instance of the constructed ODE collision model.
Accessors
Definition at line 381 of file collision_models.h.
| void planning_environment::CollisionModels::getCollisionSpaceAllowedCollisions | ( | arm_navigation_msgs::AllowedCollisionMatrix & | matrix | ) | const |
Definition at line 1265 of file collision_models.cpp.
| void planning_environment::CollisionModels::getCollisionSpaceAttachedCollisionObjects | ( | std::vector< arm_navigation_msgs::AttachedCollisionObject > & | avec | ) | const |
Definition at line 1310 of file collision_models.cpp.
| void planning_environment::CollisionModels::getCollisionSpaceCollisionMap | ( | arm_navigation_msgs::CollisionMap & | cmap | ) | const |
Definition at line 1219 of file collision_models.cpp.
| void planning_environment::CollisionModels::getCollisionSpaceCollisionObjects | ( | std::vector< arm_navigation_msgs::CollisionObject > & | omap | ) | const |
Definition at line 1271 of file collision_models.cpp.
| const collision_space::EnvironmentModel::AllowedCollisionMatrix & planning_environment::CollisionModels::getCurrentAllowedCollisionMatrix | ( | ) | const |
Definition at line 1180 of file collision_models.cpp.
| void planning_environment::CollisionModels::getCurrentLinkPadding | ( | std::vector< arm_navigation_msgs::LinkPadding > & | link_padding | ) |
Definition at line 1077 of file collision_models.cpp.
| std::map<std::string,double> planning_environment::CollisionModels::getCurrentLinkPaddingMap | ( | ) | const [inline] |
Definition at line 411 of file collision_models.h.
| const collision_space::EnvironmentModel::AllowedCollisionMatrix & planning_environment::CollisionModels::getDefaultAllowedCollisionMatrix | ( | ) | const |
Definition at line 1185 of file collision_models.cpp.
| const std::map<std::string,double>& planning_environment::CollisionModels::getDefaultLinkPaddingMap | ( | ) | const [inline] |
Definition at line 407 of file collision_models.h.
| double planning_environment::CollisionModels::getDefaultObjectPadding | ( | void | ) | const [inline] |
Definition at line 397 of file collision_models.h.
| void planning_environment::CollisionModels::getDefaultOrderedCollisionOperations | ( | std::vector< arm_navigation_msgs::CollisionOperation > & | self_collision | ) | const [inline] |
Definition at line 402 of file collision_models.h.
| double planning_environment::CollisionModels::getDefaultPadding | ( | void | ) | const [inline] |
Get the padding to be used for the robot parts when inserted in the collision space.
Definition at line 392 of file collision_models.h.
| double planning_environment::CollisionModels::getDefaultScale | ( | void | ) | const [inline] |
Get the scaling to be used for the robot parts when inserted in the collision space.
Definition at line 386 of file collision_models.h.
| void planning_environment::CollisionModels::getGroupAndUpdatedJointMarkersGivenState | ( | const planning_models::KinematicState & | state, |
| visualization_msgs::MarkerArray & | arr, | ||
| const std::string & | group_name, | ||
| const std_msgs::ColorRGBA & | group_color, | ||
| const std_msgs::ColorRGBA & | updated_color, | ||
| const ros::Duration & | lifetime | ||
| ) | const |
Definition at line 2056 of file collision_models.cpp.
| void planning_environment::CollisionModels::getLastCollisionMap | ( | arm_navigation_msgs::CollisionMap & | cmap | ) | const |
Definition at line 1190 of file collision_models.cpp.
| const std::map<std::string, std::map<std::string, bodies::BodyVector*> >& planning_environment::CollisionModels::getLinkAttachedObjects | ( | ) | const [inline] |
Definition at line 175 of file collision_models.h.
| void planning_environment::CollisionModels::getPlanningSceneGivenState | ( | const planning_models::KinematicState & | state, |
| arm_navigation_msgs::PlanningScene & | scene | ||
| ) |
Definition at line 1883 of file collision_models.cpp.
| void planning_environment::CollisionModels::getRobotMarkersGivenState | ( | const planning_models::KinematicState & | state, |
| visualization_msgs::MarkerArray & | arr, | ||
| const std_msgs::ColorRGBA & | color, | ||
| const std::string & | name, | ||
| const ros::Duration & | lifetime, | ||
| const std::vector< std::string > * | names = NULL, |
||
| const double | scale = 1.0, |
||
| const bool | show_collision_models = true |
||
| ) | const |
Definition at line 1906 of file collision_models.cpp.
| void planning_environment::CollisionModels::getRobotPaddedMarkersGivenState | ( | const planning_models::KinematicState & | state, |
| visualization_msgs::MarkerArray & | arr, | ||
| const std_msgs::ColorRGBA & | color, | ||
| const std::string & | name, | ||
| const ros::Duration & | lifetime, | ||
| const std::vector< std::string > * | names = NULL |
||
| ) | const |
Definition at line 2015 of file collision_models.cpp.
| const std::map<std::string, geometry_msgs::TransformStamped>& planning_environment::CollisionModels::getSceneTransformMap | ( | ) | const [inline] |
Definition at line 419 of file collision_models.h.
| void planning_environment::CollisionModels::getStaticCollisionObjectMarkers | ( | visualization_msgs::MarkerArray & | arr, |
| const std::string & | ns, | ||
| const std_msgs::ColorRGBA & | color, | ||
| const ros::Duration & | lifetime | ||
| ) | const |
Definition at line 1780 of file collision_models.cpp.
| double planning_environment::CollisionModels::getTotalTrajectoryJointLength | ( | planning_models::KinematicState & | state, |
| const trajectory_msgs::JointTrajectory & | trajectory | ||
| ) | const |
Definition at line 1703 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isJointTrajectoryValid | ( | const arm_navigation_msgs::PlanningScene & | planning_scene, |
| const trajectory_msgs::JointTrajectory & | trajectory, | ||
| const arm_navigation_msgs::Constraints & | goal_constraints, | ||
| const arm_navigation_msgs::Constraints & | path_constraints, | ||
| arm_navigation_msgs::ArmNavigationErrorCodes & | error_code, | ||
| std::vector< arm_navigation_msgs::ArmNavigationErrorCodes > & | trajectory_error_codes, | ||
| const bool | evaluate_entire_trajectory | ||
| ) |
Definition at line 1524 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isJointTrajectoryValid | ( | planning_models::KinematicState & | state, |
| const trajectory_msgs::JointTrajectory & | trajectory, | ||
| const arm_navigation_msgs::Constraints & | goal_constraints, | ||
| const arm_navigation_msgs::Constraints & | path_constraints, | ||
| arm_navigation_msgs::ArmNavigationErrorCodes & | error_code, | ||
| std::vector< arm_navigation_msgs::ArmNavigationErrorCodes > & | trajectory_error_codes, | ||
| const bool | evaluate_entire_trajectory | ||
| ) |
Definition at line 1550 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isKinematicStateInCollision | ( | const planning_models::KinematicState & | state | ) |
Definition at line 1349 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isKinematicStateInEnvironmentCollision | ( | const planning_models::KinematicState & | state | ) |
Definition at line 1367 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isKinematicStateInObjectCollision | ( | const planning_models::KinematicState & | state, |
| const std::string & | object_name | ||
| ) |
Definition at line 1376 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isKinematicStateInSelfCollision | ( | const planning_models::KinematicState & | state | ) |
Definition at line 1358 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isKinematicStateValid | ( | const planning_models::KinematicState & | state, |
| const std::vector< std::string > & | names, | ||
| arm_navigation_msgs::ArmNavigationErrorCodes & | error_code, | ||
| const arm_navigation_msgs::Constraints | goal_constraints, | ||
| const arm_navigation_msgs::Constraints | path_constraints, | ||
| bool | verbose = false |
||
| ) |
Definition at line 1467 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isObjectInCollision | ( | const std::string & | object_name | ) |
Definition at line 1385 of file collision_models.cpp.
| bool planning_environment::CollisionModels::isPlanningSceneSet | ( | ) | const [inline] |
Definition at line 415 of file collision_models.h.
| void planning_environment::CollisionModels::loadCollisionFromParamServer | ( | ) | [protected] |
Definition at line 190 of file collision_models.cpp.
| bool planning_environment::CollisionModels::loadJointTrajectoriesInPlanningSceneBag | ( | const std::string & | filename, |
| const std::string & | topic_name, | ||
| std::vector< trajectory_msgs::JointTrajectory > & | traj_vec | ||
| ) |
Definition at line 2190 of file collision_models.cpp.
| bool planning_environment::CollisionModels::loadMotionPlanRequestsInPlanningSceneBag | ( | const std::string & | filename, |
| const std::string & | topic_name, | ||
| std::vector< arm_navigation_msgs::MotionPlanRequest > & | motion_plan_reqs | ||
| ) |
Definition at line 2160 of file collision_models.cpp.
| void planning_environment::CollisionModels::maskAndDeleteShapeVector | ( | std::vector< shapes::Shape * > & | shapes, |
| std::vector< tf::Transform > & | poses | ||
| ) |
Definition at line 747 of file collision_models.cpp.
| bool planning_environment::CollisionModels::readPlanningSceneBag | ( | const std::string & | filename, |
| arm_navigation_msgs::PlanningScene & | planning_scene | ||
| ) | const |
Definition at line 2111 of file collision_models.cpp.
Definition at line 737 of file collision_models.cpp.
Definition at line 1253 of file collision_models.cpp.
Definition at line 1259 of file collision_models.cpp.
| void planning_environment::CollisionModels::revertPlanningScene | ( | planning_models::KinematicState * | state | ) |
Definition at line 339 of file collision_models.cpp.
| bool planning_environment::CollisionModels::setAlteredAllowedCollisionMatrix | ( | const collision_space::EnvironmentModel::AllowedCollisionMatrix & | acm | ) |
Definition at line 1172 of file collision_models.cpp.
| void planning_environment::CollisionModels::setCollisionMap | ( | const arm_navigation_msgs::CollisionMap & | map, |
| bool | mask_before_insertion = true |
||
| ) |
Definition at line 700 of file collision_models.cpp.
| void planning_environment::CollisionModels::setCollisionMap | ( | std::vector< shapes::Shape * > & | shapes, |
| const std::vector< tf::Transform > & | poses, | ||
| bool | mask_before_insertion = true |
||
| ) |
Definition at line 714 of file collision_models.cpp.
| planning_models::KinematicState * planning_environment::CollisionModels::setPlanningScene | ( | const arm_navigation_msgs::PlanningScene & | planning_scene | ) |
Functions for updating state
Definition at line 229 of file collision_models.cpp.
| void planning_environment::CollisionModels::setupModelFromParamServer | ( | collision_space::EnvironmentModel * | model | ) | [protected] |
Definition at line 78 of file collision_models.cpp.
| bool planning_environment::CollisionModels::updateAttachedBodyPoses | ( | const planning_models::KinematicState & | state | ) |
Definition at line 615 of file collision_models.cpp.
| bool planning_environment::CollisionModels::updateAttachedBodyPosesForLink | ( | const planning_models::KinematicState & | state, |
| const std::string & | link_name | ||
| ) |
Definition at line 585 of file collision_models.cpp.
| void planning_environment::CollisionModels::writePlanningSceneBag | ( | const std::string & | filename, |
| const arm_navigation_msgs::PlanningScene & | planning_scene | ||
| ) | const |
Functions for bag manipulation
Definition at line 2100 of file collision_models.cpp.
Member Data Documentation
double planning_environment::CollisionModels::attached_padd_ [protected] |
Definition at line 487 of file collision_models.h.
boost::recursive_mutex planning_environment::CollisionModels::bodies_lock_ [mutable, protected] |
Definition at line 468 of file collision_models.h.
std::vector<double> planning_environment::CollisionModels::bounding_planes_ [protected] |
Definition at line 488 of file collision_models.h.
std::vector<tf::Transform> planning_environment::CollisionModels::collision_map_poses_ [protected] |
Definition at line 471 of file collision_models.h.
std::vector<shapes::Shape*> planning_environment::CollisionModels::collision_map_shapes_ [protected] |
Definition at line 470 of file collision_models.h.
std::vector<arm_navigation_msgs::CollisionOperation> planning_environment::CollisionModels::default_collision_operations_ [protected] |
Definition at line 490 of file collision_models.h.
double planning_environment::CollisionModels::default_padd_ [protected] |
Definition at line 485 of file collision_models.h.
double planning_environment::CollisionModels::default_scale_ [protected] |
Definition at line 484 of file collision_models.h.
std::map<std::string, std::map<std::string, bodies::BodyVector*> > planning_environment::CollisionModels::link_attached_objects_ [protected] |
Definition at line 475 of file collision_models.h.
double planning_environment::CollisionModels::object_padd_ [protected] |
Definition at line 486 of file collision_models.h.
collision_space::EnvironmentModel* planning_environment::CollisionModels::ode_collision_model_ [protected] |
Definition at line 480 of file collision_models.h.
bool planning_environment::CollisionModels::planning_scene_set_ [protected] |
Definition at line 482 of file collision_models.h.
std::map<std::string, geometry_msgs::TransformStamped> planning_environment::CollisionModels::scene_transform_map_ [protected] |
Definition at line 492 of file collision_models.h.
std::map<std::string, bodies::BodyVector*> planning_environment::CollisionModels::static_object_map_ [protected] |
Definition at line 473 of file collision_models.h.
The documentation for this class was generated from the following files: