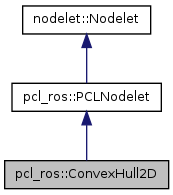
ConvexHull2D represents a 2D ConvexHull implementation. More...
#include <convex_hull.h>
Private Types | |
| typedef pcl::PointCloud < pcl::PointXYZ > | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Private Member Functions | |
| void | input_indices_callback (const PointCloudConstPtr &cloud, const PointIndicesConstPtr &indices) |
| Input point cloud callback. | |
| virtual void | onInit () |
| Nodelet initialization routine. | |
Private Attributes | |
| pcl::ConvexHull< pcl::PointXYZ > | impl_ |
| The PCL implementation used. | |
| ros::Publisher | pub_plane_ |
| Publisher for PolygonStamped. | |
| ros::Subscriber | sub_input_ |
| The input PointCloud subscriber. | |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ApproximateTime < PointCloud, PointIndices > > > | sync_input_indices_a_ |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ExactTime < PointCloud, PointIndices > > > | sync_input_indices_e_ |
| Synchronized input, and indices. | |
Detailed Description
ConvexHull2D represents a 2D ConvexHull implementation.
Definition at line 56 of file convex_hull.h.
Member Typedef Documentation
typedef pcl::PointCloud<pcl::PointXYZ> pcl_ros::ConvexHull2D::PointCloud [private] |
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 58 of file convex_hull.h.
typedef PointCloud::ConstPtr pcl_ros::ConvexHull2D::PointCloudConstPtr [private] |
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 60 of file convex_hull.h.
typedef PointCloud::Ptr pcl_ros::ConvexHull2D::PointCloudPtr [private] |
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 59 of file convex_hull.h.
Member Function Documentation
| void pcl_ros::ConvexHull2D::input_indices_callback | ( | const PointCloudConstPtr & | cloud, |
| const PointIndicesConstPtr & | indices | ||
| ) | [private] |
Input point cloud callback.
- Parameters:
-
cloud the pointer to the input point cloud indices the pointer to the input point cloud indices
DEBUG
Definition at line 89 of file convex_hull.cpp.
| void pcl_ros::ConvexHull2D::onInit | ( | ) | [private, virtual] |
Nodelet initialization routine.
Reimplemented from pcl_ros::PCLNodelet.
Definition at line 45 of file convex_hull.cpp.
Member Data Documentation
pcl::ConvexHull<pcl::PointXYZ> pcl_ros::ConvexHull2D::impl_ [private] |
The PCL implementation used.
Definition at line 75 of file convex_hull.h.
Publisher for PolygonStamped.
Definition at line 81 of file convex_hull.h.
The input PointCloud subscriber.
Definition at line 78 of file convex_hull.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ApproximateTime<PointCloud, PointIndices> > > pcl_ros::ConvexHull2D::sync_input_indices_a_ [private] |
Definition at line 85 of file convex_hull.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ExactTime<PointCloud, PointIndices> > > pcl_ros::ConvexHull2D::sync_input_indices_e_ [private] |
Synchronized input, and indices.
Definition at line 84 of file convex_hull.h.
The documentation for this class was generated from the following files: