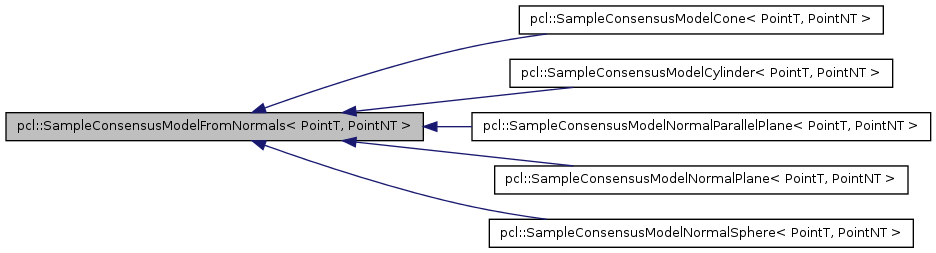
SampleConsensusModelFromNormals represents the base model class for models that require the use of surface normals for estimation. More...
#include <sac_model.h>
Public Types | |
| typedef boost::shared_ptr < const SampleConsensusModelFromNormals > | ConstPtr |
| typedef pcl::PointCloud < PointNT >::ConstPtr | PointCloudNConstPtr |
| typedef pcl::PointCloud < PointNT >::Ptr | PointCloudNPtr |
| typedef boost::shared_ptr < SampleConsensusModelFromNormals > | Ptr |
Public Member Functions | |
| PointCloudNConstPtr | getInputNormals () |
| Get a pointer to the normals of the input XYZ point cloud dataset. | |
| double | getNormalDistanceWeight () |
| Get the normal angular distance weight. | |
| SampleConsensusModelFromNormals () | |
| Empty constructor for base SampleConsensusModelFromNormals. | |
| void | setInputNormals (const PointCloudNConstPtr &normals) |
| Provide a pointer to the input dataset that contains the point normals of the XYZ dataset. | |
| void | setNormalDistanceWeight (const double w) |
| Set the normal angular distance weight. | |
| virtual | ~SampleConsensusModelFromNormals () |
| Destructor. | |
Protected Attributes | |
| double | normal_distance_weight_ |
| The relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal. | |
| PointCloudNConstPtr | normals_ |
| A pointer to the input dataset that contains the point normals of the XYZ dataset. | |
Detailed Description
template<typename PointT, typename PointNT>
class pcl::SampleConsensusModelFromNormals< PointT, PointNT >
SampleConsensusModelFromNormals represents the base model class for models that require the use of surface normals for estimation.
Definition at line 503 of file sac_model.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const SampleConsensusModelFromNormals> pcl::SampleConsensusModelFromNormals< PointT, PointNT >::ConstPtr |
Definition at line 510 of file sac_model.h.
| typedef pcl::PointCloud<PointNT>::ConstPtr pcl::SampleConsensusModelFromNormals< PointT, PointNT >::PointCloudNConstPtr |
Reimplemented in pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >, pcl::SampleConsensusModelNormalPlane< PointT, PointNT >, and pcl::SampleConsensusModelNormalSphere< PointT, PointNT >.
Definition at line 506 of file sac_model.h.
| typedef pcl::PointCloud<PointNT>::Ptr pcl::SampleConsensusModelFromNormals< PointT, PointNT >::PointCloudNPtr |
Reimplemented in pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >, pcl::SampleConsensusModelNormalPlane< PointT, PointNT >, and pcl::SampleConsensusModelNormalSphere< PointT, PointNT >.
Definition at line 507 of file sac_model.h.
| typedef boost::shared_ptr<SampleConsensusModelFromNormals> pcl::SampleConsensusModelFromNormals< PointT, PointNT >::Ptr |
Reimplemented in pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT >, pcl::SampleConsensusModelNormalPlane< PointT, PointNT >, pcl::SampleConsensusModelNormalSphere< PointT, PointNT >, pcl::SampleConsensusModelCone< PointT, PointNT >, and pcl::SampleConsensusModelCylinder< PointT, PointNT >.
Definition at line 509 of file sac_model.h.
Constructor & Destructor Documentation
| pcl::SampleConsensusModelFromNormals< PointT, PointNT >::SampleConsensusModelFromNormals | ( | ) | [inline] |
Empty constructor for base SampleConsensusModelFromNormals.
Definition at line 513 of file sac_model.h.
| virtual pcl::SampleConsensusModelFromNormals< PointT, PointNT >::~SampleConsensusModelFromNormals | ( | ) | [inline, virtual] |
Destructor.
Definition at line 516 of file sac_model.h.
Member Function Documentation
| PointCloudNConstPtr pcl::SampleConsensusModelFromNormals< PointT, PointNT >::getInputNormals | ( | ) | [inline] |
Get a pointer to the normals of the input XYZ point cloud dataset.
Definition at line 546 of file sac_model.h.
| double pcl::SampleConsensusModelFromNormals< PointT, PointNT >::getNormalDistanceWeight | ( | ) | [inline] |
Get the normal angular distance weight.
Definition at line 531 of file sac_model.h.
| void pcl::SampleConsensusModelFromNormals< PointT, PointNT >::setInputNormals | ( | const PointCloudNConstPtr & | normals | ) | [inline] |
Provide a pointer to the input dataset that contains the point normals of the XYZ dataset.
- Parameters:
-
[in] normals the const boost shared pointer to a PointCloud message
Definition at line 539 of file sac_model.h.
| void pcl::SampleConsensusModelFromNormals< PointT, PointNT >::setNormalDistanceWeight | ( | const double | w | ) | [inline] |
Set the normal angular distance weight.
- Parameters:
-
[in] w the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal. (The Euclidean distance will have weight 1-w.)
Definition at line 524 of file sac_model.h.
Member Data Documentation
double pcl::SampleConsensusModelFromNormals< PointT, PointNT >::normal_distance_weight_ [protected] |
The relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal.
Definition at line 552 of file sac_model.h.
PointCloudNConstPtr pcl::SampleConsensusModelFromNormals< PointT, PointNT >::normals_ [protected] |
A pointer to the input dataset that contains the point normals of the XYZ dataset.
Definition at line 557 of file sac_model.h.
The documentation for this class was generated from the following file: