Class that calculates the "surflet" features for each pair in the given pointcloud. Please refer to the following publication for more details: B. Drost, M. Ulrich, N. Navab, S. Ilic Model Globally, Match Locally: Efficient and Robust 3D Object Recognition 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 13-18 June 2010, San Francisco, CA. More...
#include <ppf.h>
Private Member Functions | |
| void | compute (pcl::PointCloud< pcl::Normal > &) |
| Make the compute (&PointCloudOut); inaccessible from outside the class. | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &output) |
| The method called for actually doing the computations. | |
Detailed Description
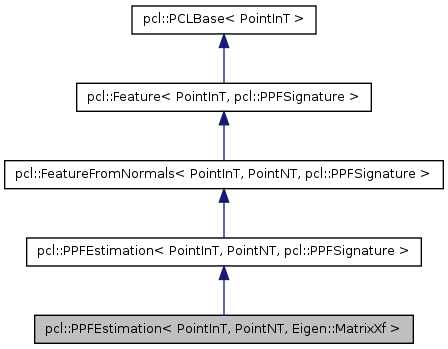
template<typename PointInT, typename PointNT>
class pcl::PPFEstimation< PointInT, PointNT, Eigen::MatrixXf >
Class that calculates the "surflet" features for each pair in the given pointcloud. Please refer to the following publication for more details: B. Drost, M. Ulrich, N. Navab, S. Ilic Model Globally, Match Locally: Efficient and Robust 3D Object Recognition 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 13-18 June 2010, San Francisco, CA.
PointOutT is meant to be pcl::PPFSignature - contains the 4 values of the Surflet feature and in addition, alpha_m for the respective pair - optimization proposed by the authors (see above)
Member Function Documentation
| void pcl::PPFEstimation< PointInT, PointNT, Eigen::MatrixXf >::compute | ( | pcl::PointCloud< pcl::Normal > & | ) | [inline, private] |
| void pcl::PPFEstimation< PointInT, PointNT, Eigen::MatrixXf >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | output | ) | [private, virtual] |
The method called for actually doing the computations.
- Parameters:
-
[out] output the resulting point cloud its size is the size of the input cloud, squared (i.e., one point for each pair in the input cloud);
Reimplemented from pcl::PPFEstimation< PointInT, PointNT, pcl::PPFSignature >.
The documentation for this class was generated from the following files: