PFHEstimation estimates the Point Feature Histogram (PFH) descriptor for a given point cloud dataset containing points and normals. More...
#include <pfh.h>
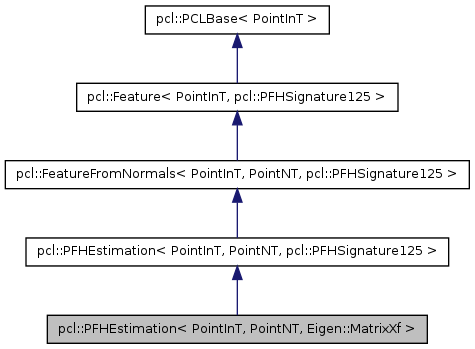
Inheritance diagram for pcl::PFHEstimation< PointInT, PointNT, Eigen::MatrixXf >:
Private Member Functions | |
| void | compute (pcl::PointCloud< pcl::PFHSignature125 > &) |
| Make the compute (&PointCloudOut); inaccessible from outside the class. | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &output) |
| Estimate the Point Feature Histograms (PFH) descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
Detailed Description
template<typename PointInT, typename PointNT>
class pcl::PFHEstimation< PointInT, PointNT, Eigen::MatrixXf >
PFHEstimation estimates the Point Feature Histogram (PFH) descriptor for a given point cloud dataset containing points and normals.
- Note:
- If you use this code in any academic work, please cite:
- R.B. Rusu, N. Blodow, Z.C. Marton, M. Beetz. Aligning Point Cloud Views using Persistent Feature Histograms. In Proceedings of the 21st IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, September 22-26 2008.
- R.B. Rusu, Z.C. Marton, N. Blodow, M. Beetz. Learning Informative Point Classes for the Acquisition of Object Model Maps. In Proceedings of the 10th International Conference on Control, Automation, Robotics and Vision (ICARCV), Hanoi, Vietnam, December 17-20 2008.
- Attention:
- The convention for PFH features is:
- if a query point's nearest neighbors cannot be estimated, the PFH feature will be set to NaN (not a number)
- it is impossible to estimate a PFH descriptor for a point that doesn't have finite 3D coordinates. Therefore, any point that contains NaN data on x, y, or z, will have its PFH feature property set to NaN.
- Note:
- The code is stateful as we do not expect this class to be multicore parallelized. Please look at FPFHEstimationOMP for examples on parallel implementations of the FPFH (Fast Point Feature Histogram).
Member Function Documentation
template<typename PointInT , typename PointNT >
| void pcl::PFHEstimation< PointInT, PointNT, Eigen::MatrixXf >::compute | ( | pcl::PointCloud< pcl::PFHSignature125 > & | ) | [inline, private] |
template<typename PointInT , typename PointNT >
| void pcl::PFHEstimation< PointInT, PointNT, Eigen::MatrixXf >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | output | ) | [private, virtual] |
Estimate the Point Feature Histograms (PFH) descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Parameters:
-
[out] output the resultant point cloud model dataset that contains the PFH feature estimates
Reimplemented from pcl::PFHEstimation< PointInT, PointNT, pcl::PFHSignature125 >.
The documentation for this class was generated from the following files: