ApproximateVoxelGrid assembles a local 3D grid over a given PointCloud, and downsamples + filters the data. More...
#include <approximate_voxel_grid.h>
Classes | |
| struct | he |
Public Member Functions | |
| ApproximateVoxelGrid () | |
| Empty constructor. | |
| ApproximateVoxelGrid (const ApproximateVoxelGrid &src) | |
| Copy constructor. | |
| bool | getDownsampleAllData () const |
| Get the state of the internal downsampling parameter (true if all fields need to be downsampled, false if just XYZ). | |
| Eigen::Vector3f | getLeafSize () const |
| Get the voxel grid leaf size. | |
| ApproximateVoxelGrid & | operator= (const ApproximateVoxelGrid &src) |
| Copy operator. | |
| void | setDownsampleAllData (bool downsample) |
| Set to true if all fields need to be downsampled, or false if just XYZ. | |
| void | setLeafSize (const Eigen::Vector3f &leaf_size) |
| Set the voxel grid leaf size. | |
| void | setLeafSize (float lx, float ly, float lz) |
| Set the voxel grid leaf size. | |
Protected Types | |
| typedef pcl::traits::fieldList < PointT >::type | FieldList |
Protected Member Functions | |
| void | applyFilter (PointCloud &output) |
| Downsample a Point Cloud using a voxelized grid approach. | |
| void | flush (PointCloud &output, size_t op, he *hhe, int rgba_index, int centroid_size) |
| Write a single point from the hash to the output cloud. | |
Protected Attributes | |
| bool | downsample_all_data_ |
| Set to true if all fields need to be downsampled, or false if just XYZ. | |
| struct he * | history_ |
| history buffer | |
| size_t | histsize_ |
| history buffer size, power of 2 | |
| Eigen::Array3f | inverse_leaf_size_ |
| Compute 1/leaf_size_ to avoid division later. | |
| Eigen::Vector3f | leaf_size_ |
| The size of a leaf. | |
Private Types | |
| typedef Filter< PointT > ::PointCloud | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Detailed Description
template<typename PointT>
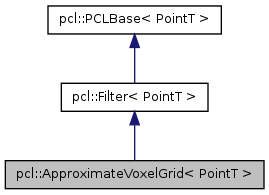
class pcl::ApproximateVoxelGrid< PointT >
ApproximateVoxelGrid assembles a local 3D grid over a given PointCloud, and downsamples + filters the data.
Definition at line 100 of file approximate_voxel_grid.h.
Member Typedef Documentation
typedef pcl::traits::fieldList<PointT>::type pcl::ApproximateVoxelGrid< PointT >::FieldList [protected] |
Definition at line 217 of file approximate_voxel_grid.h.
typedef Filter<PointT>::PointCloud pcl::ApproximateVoxelGrid< PointT >::PointCloud [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 107 of file approximate_voxel_grid.h.
typedef PointCloud::ConstPtr pcl::ApproximateVoxelGrid< PointT >::PointCloudConstPtr [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 109 of file approximate_voxel_grid.h.
typedef PointCloud::Ptr pcl::ApproximateVoxelGrid< PointT >::PointCloudPtr [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 108 of file approximate_voxel_grid.h.
Constructor & Destructor Documentation
| pcl::ApproximateVoxelGrid< PointT >::ApproximateVoxelGrid | ( | ) | [inline] |
Empty constructor.
Definition at line 122 of file approximate_voxel_grid.h.
| pcl::ApproximateVoxelGrid< PointT >::ApproximateVoxelGrid | ( | const ApproximateVoxelGrid< PointT > & | src | ) | [inline] |
Copy constructor.
- Parameters:
-
[in] src the approximate voxel grid to copy into this.
Definition at line 135 of file approximate_voxel_grid.h.
Member Function Documentation
| void pcl::ApproximateVoxelGrid< PointT >::applyFilter | ( | PointCloud & | output | ) | [protected, virtual] |
Downsample a Point Cloud using a voxelized grid approach.
- Parameters:
-
output the resultant point cloud message
Implements pcl::Filter< PointT >.
Definition at line 64 of file approximate_voxel_grid.hpp.
| void pcl::ApproximateVoxelGrid< PointT >::flush | ( | PointCloud & | output, |
| size_t | op, | ||
| he * | hhe, | ||
| int | rgba_index, | ||
| int | centroid_size | ||
| ) | [protected] |
Write a single point from the hash to the output cloud.
Definition at line 46 of file approximate_voxel_grid.hpp.
| bool pcl::ApproximateVoxelGrid< PointT >::getDownsampleAllData | ( | ) | const [inline] |
Get the state of the internal downsampling parameter (true if all fields need to be downsampled, false if just XYZ).
Definition at line 199 of file approximate_voxel_grid.h.
| Eigen::Vector3f pcl::ApproximateVoxelGrid< PointT >::getLeafSize | ( | ) | const [inline] |
Get the voxel grid leaf size.
Definition at line 187 of file approximate_voxel_grid.h.
| ApproximateVoxelGrid& pcl::ApproximateVoxelGrid< PointT >::operator= | ( | const ApproximateVoxelGrid< PointT > & | src | ) | [inline] |
Copy operator.
- Parameters:
-
[in] src the approximate voxel grid to copy into this.
Definition at line 152 of file approximate_voxel_grid.h.
| void pcl::ApproximateVoxelGrid< PointT >::setDownsampleAllData | ( | bool | downsample | ) | [inline] |
Set to true if all fields need to be downsampled, or false if just XYZ.
- Parameters:
-
downsample the new value (true/false)
Definition at line 193 of file approximate_voxel_grid.h.
| void pcl::ApproximateVoxelGrid< PointT >::setLeafSize | ( | const Eigen::Vector3f & | leaf_size | ) | [inline] |
Set the voxel grid leaf size.
- Parameters:
-
[in] leaf_size the voxel grid leaf size
Definition at line 168 of file approximate_voxel_grid.h.
| void pcl::ApproximateVoxelGrid< PointT >::setLeafSize | ( | float | lx, |
| float | ly, | ||
| float | lz | ||
| ) | [inline] |
Set the voxel grid leaf size.
- Parameters:
-
[in] lx the leaf size for X [in] ly the leaf size for Y [in] lz the leaf size for Z
Definition at line 180 of file approximate_voxel_grid.h.
Member Data Documentation
bool pcl::ApproximateVoxelGrid< PointT >::downsample_all_data_ [protected] |
Set to true if all fields need to be downsampled, or false if just XYZ.
Definition at line 209 of file approximate_voxel_grid.h.
struct he* pcl::ApproximateVoxelGrid< PointT >::history_ [protected] |
history buffer
Definition at line 215 of file approximate_voxel_grid.h.
size_t pcl::ApproximateVoxelGrid< PointT >::histsize_ [protected] |
history buffer size, power of 2
Definition at line 212 of file approximate_voxel_grid.h.
Eigen::Array3f pcl::ApproximateVoxelGrid< PointT >::inverse_leaf_size_ [protected] |
Compute 1/leaf_size_ to avoid division later.
Definition at line 206 of file approximate_voxel_grid.h.
Eigen::Vector3f pcl::ApproximateVoxelGrid< PointT >::leaf_size_ [protected] |
The size of a leaf.
Definition at line 203 of file approximate_voxel_grid.h.
The documentation for this class was generated from the following files: