#include <OccupancyGrid.h>
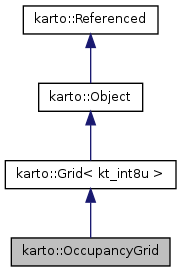
Detailed Description
Occupancy grid definition. See GridStates for possible grid values.
Definition at line 56 of file OccupancyGrid.h.
Constructor & Destructor Documentation
| karto::OccupancyGrid::OccupancyGrid | ( | kt_int32s | width, |
| kt_int32s | height, | ||
| const Vector2d & | rOffset, | ||
| kt_double | resolution | ||
| ) |
Occupancy grid of given size
- Parameters:
-
width width height height rOffset offset resolution resolution
Definition at line 28 of file OccupancyGrid.cpp.
| karto::OccupancyGrid::OccupancyGrid | ( | const OccupancyGrid & | ) | [private] |
Member Function Documentation
| kt_bool karto::OccupancyGrid::AddScan | ( | LocalizedLaserScan * | pScan, |
| kt_bool | doUpdate = false |
||
| ) | [protected] |
Adds the scan's information to this grid's counters (optionally update the grid's cells' occupancy status)
- Parameters:
-
pScan laser scan doUpdate whether to update the grid's cell's occupancy status
- Returns:
- returns false if an endpoint fell off the grid, otherwise true
Definition at line 142 of file OccupancyGrid.cpp.
| OccupancyGrid * karto::OccupancyGrid::Clone | ( | ) | const |
| void karto::OccupancyGrid::ComputeDimensions | ( | const LocalizedLaserScanList & | rScans, |
| kt_double | resolution, | ||
| kt_int32s & | rWidth, | ||
| kt_int32s & | rHeight, | ||
| Vector2d & | rOffset | ||
| ) | [static, protected] |
Calculates grid dimensions from localized laser scans and resolution
- Parameters:
-
rScans scans resolution resolution rWidth (output parameter) width rHeight (output parameter) height rOffset (output parameter) offset
Definition at line 105 of file OccupancyGrid.cpp.
| OccupancyGrid * karto::OccupancyGrid::CreateFromMapper | ( | OpenMapper * | pMapper, |
| kt_double | resolution | ||
| ) | [static] |
Occupancy grid from the scans in the given mapper using the given resolution
- Note:
- Please assign the returned occupancy grid to an OccupancyGridPtr to avoid memory leaks.
- Parameters:
-
pMapper mapper resolution resolution
- Returns:
- occupancy grid from the given scans using the given resolution
Definition at line 100 of file OccupancyGrid.cpp.
| OccupancyGrid * karto::OccupancyGrid::CreateFromScans | ( | const LocalizedLaserScanList & | rScans, |
| kt_double | resolution | ||
| ) | [static] |
Occupancy grid from the given scans using the given resolution
- Note:
- Please assign the returned occupancy grid to an OccupancyGridPtr to avoid memory leaks.
- Parameters:
-
rScans list of scans resolution resolution
- Returns:
- occupancy grid from the given scans using the given resolution
Definition at line 84 of file OccupancyGrid.cpp.
| OccupancyGrid * karto::OccupancyGrid::CreateFromScans | ( | const std::vector< SmartPointer< LocalizedRangeScan > > & | rScans, |
| kt_double | resolution | ||
| ) | [static] |
Occupancy grid from the given scans using the given resolution
- Note:
- Please assign the returned occupancy grid to an OccupancyGridPtr to avoid memory leaks.
- Parameters:
-
rScans scans resolution resolution
- Warning:
- Throws exception in Windows
- Returns:
- occupancy grid from the given scans using the given resolution
Definition at line 72 of file OccupancyGrid.cpp.
| void karto::OccupancyGrid::CreateFromScans | ( | const LocalizedLaserScanList & | rScans | ) | [protected, virtual] |
| Grid<kt_int32u>* karto::OccupancyGrid::GetCellHitsCounts | ( | ) | [inline, protected] |
Gets grid of cell hit counts
- Returns:
- grid of cell hit counts
Definition at line 144 of file OccupancyGrid.h.
| Grid<kt_int32u>* karto::OccupancyGrid::GetCellPassCounts | ( | ) | [inline, protected] |
Get grid of cell pass counts
- Returns:
- grid of cell pass counts
Definition at line 153 of file OccupancyGrid.h.
| kt_bool karto::OccupancyGrid::IsFree | ( | const Vector2i & | rGridIndex | ) | const [inline] |
Checks if the given grid index is free
- Parameters:
-
rGridIndex grid index
- Returns:
- whether the cell at the given grid index is free space
Definition at line 124 of file OccupancyGrid.h.
| karto::OccupancyGrid::KARTO_RTTI | ( | ) | [private] |
Reimplemented from karto::Grid< kt_int8u >.
| const OccupancyGrid& karto::OccupancyGrid::operator= | ( | const OccupancyGrid & | ) | [private] |
| kt_double karto::OccupancyGrid::RayCast | ( | const Pose2 & | rPose2, |
| kt_double | maxRange | ||
| ) | const |
Casts a ray from the given point (up to the given max range) and returns the distance to the closest obstacle
- Parameters:
-
rPose2 starting point maxRange maximum range
- Returns:
- distance to closest obstacle
Definition at line 186 of file OccupancyGrid.cpp.
| kt_bool karto::OccupancyGrid::RayTrace | ( | const Vector2d & | rWorldFrom, |
| const Vector2d & | rWorldTo, | ||
| kt_bool | isEndPointValid, | ||
| kt_bool | doUpdate = false |
||
| ) | [protected] |
Traces a beam from the start position to the end position marking the bookkeeping arrays accordingly.
- Parameters:
-
rWorldFrom start position of beam rWorldTo end position of beam isEndPointValid is the reading within the range threshold? doUpdate whether to update the cells' occupancy status immediately
- Returns:
- returns false if an endpoint fell off the grid, otherwise true
Definition at line 226 of file OccupancyGrid.cpp.
| void karto::OccupancyGrid::Resize | ( | kt_int32s | width, |
| kt_int32s | height | ||
| ) | [protected, virtual] |
Resizes the grid (deletes all old data)
- Parameters:
-
width new width height new height
Reimplemented from karto::Grid< kt_int8u >.
Definition at line 296 of file OccupancyGrid.cpp.
| void karto::OccupancyGrid::UpdateCell | ( | kt_int8u * | pCell, |
| kt_int32u | cellPassCnt, | ||
| kt_int32u | cellHitCnt | ||
| ) | [protected] |
Updates a single cell's value based on the given counters
- Parameters:
-
pCell cell cellPassCnt cell pass count cellHitCnt cell hit count
Definition at line 260 of file OccupancyGrid.cpp.
| void karto::OccupancyGrid::UpdateGrid | ( | ) | [protected] |
Updates the grid based on the values in m_pCellHitsCnt and m_pCellPassCnt
Definition at line 277 of file OccupancyGrid.cpp.
Friends And Related Function Documentation
friend class CellUpdater [friend] |
Definition at line 61 of file OccupancyGrid.h.
friend class IncrementalOccupancyGrid [friend] |
Definition at line 62 of file OccupancyGrid.h.
Member Data Documentation
SmartPointer< Grid<kt_int32u> > karto::OccupancyGrid::m_pCellHitsCnt [protected] |
Counters of number of times a beam ended at a cell
Definition at line 223 of file OccupancyGrid.h.
SmartPointer< Grid<kt_int32u> > karto::OccupancyGrid::m_pCellPassCnt [protected] |
Counters of number of times a beam passed through a cell
Definition at line 218 of file OccupancyGrid.h.
CellUpdater* karto::OccupancyGrid::m_pCellUpdater [private] |
Definition at line 226 of file OccupancyGrid.h.
Definition at line 234 of file OccupancyGrid.h.
Definition at line 237 of file OccupancyGrid.h.
The documentation for this class was generated from the following files: