#include <moveit/robot_model/robot_model.h>#include <moveit/robot_state/robot_state.h>#include <moveit/transforms/transforms.h>#include <moveit/collision_detection/collision_detector_allocator.h>#include <moveit/collision_detection/world_diff.h>#include <moveit/kinematic_constraints/kinematic_constraint.h>#include <moveit/kinematics_base/kinematics_base.h>#include <moveit/robot_trajectory/robot_trajectory.h>#include <moveit/macros/deprecation.h>#include <moveit_msgs/PlanningScene.h>#include <moveit_msgs/RobotTrajectory.h>#include <moveit_msgs/Constraints.h>#include <moveit_msgs/PlanningSceneComponents.h>#include <boost/enable_shared_from_this.hpp>#include <boost/noncopyable.hpp>#include <boost/shared_ptr.hpp>#include <boost/function.hpp>#include <boost/concept_check.hpp>
Include dependency graph for planning_scene.h:

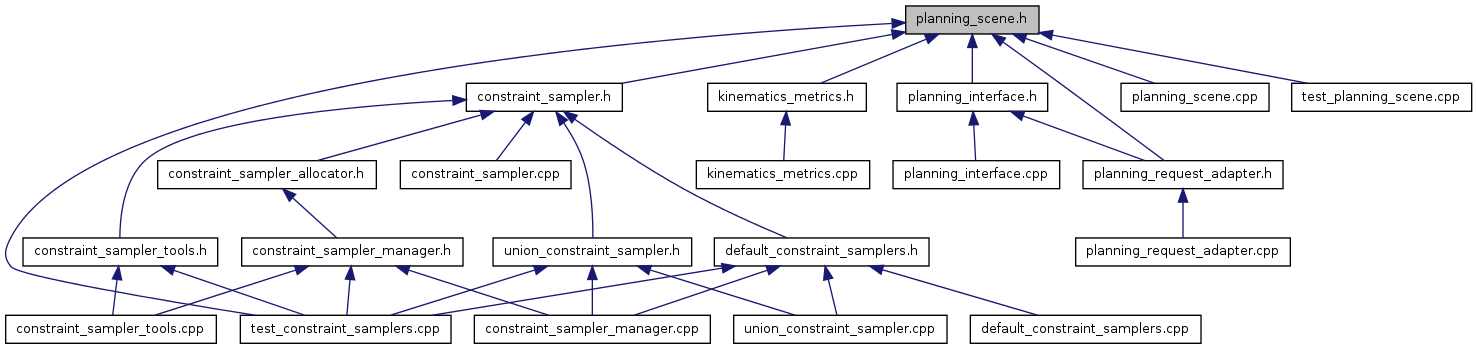
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | planning_scene::PlanningScene::CollisionDetector |
| class | planning_scene::PlanningScene |
| This class maintains the representation of the environment as seen by a planning instance. The environment geometry, the robot geometry and state are maintained. More... | |
Namespaces | |
| namespace | planning_scene |
This namespace includes the central class for representing planning contexts. | |
Typedefs | |
| typedef boost::function< bool(const robot_state::RobotState &, const robot_state::RobotState &, bool)> | planning_scene::MotionFeasibilityFn |
| This is the function signature for additional feasibility checks to be imposed on motions segments between states (in addition to respecting constraints and collision avoidance). The order of the arguments matters: the notion of feasibility is to be checked for motion segments that start at the first state and end at the second state. The third argument indicates whether the check should be verbose or not. | |
| typedef std::map< std::string, std_msgs::ColorRGBA > | planning_scene::ObjectColorMap |
| A map from object names (e.g., attached bodies, collision objects) to their colors. | |
| typedef std::map< std::string, object_recognition_msgs::ObjectType > | planning_scene::ObjectTypeMap |
| A map from object names (e.g., attached bodies, collision objects) to their types. | |
| typedef boost::shared_ptr < const PlanningScene > | planning_scene::PlanningSceneConstPtr |
| typedef boost::shared_ptr < PlanningScene > | planning_scene::PlanningScenePtr |
| typedef boost::function< bool(const robot_state::RobotState &, bool)> | planning_scene::StateFeasibilityFn |
| This is the function signature for additional feasibility checks to be imposed on states (in addition to respecting constraints and collision avoidance). The first argument is the state to check the feasibility for, the second one is whether the check should be verbose or not. | |