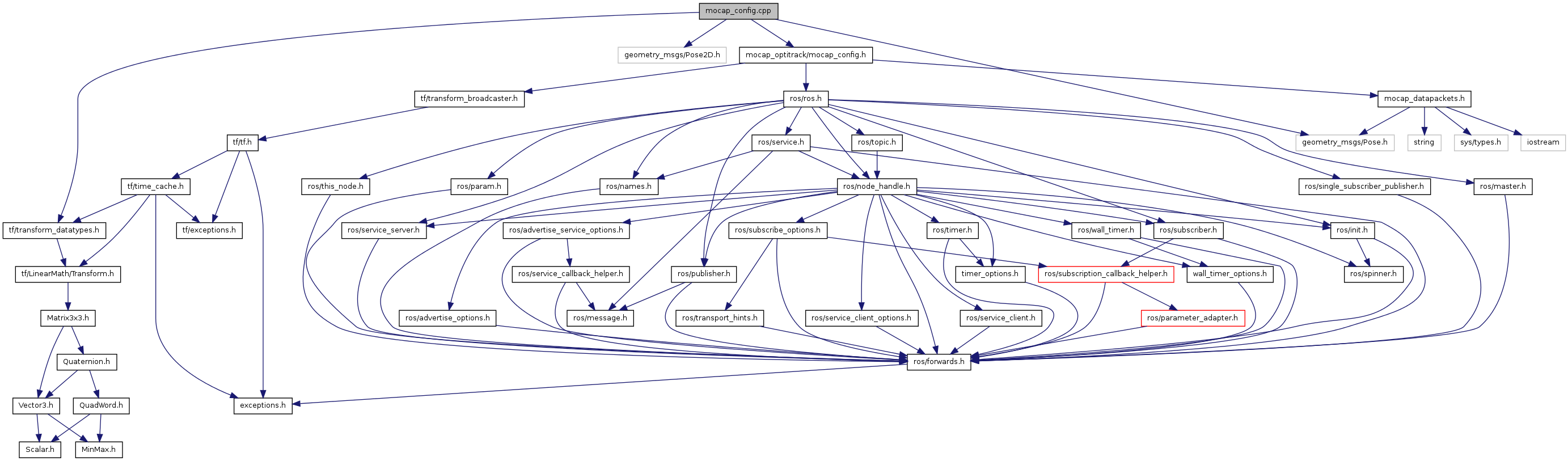
#include <geometry_msgs/Pose.h>#include <geometry_msgs/Pose2D.h>#include <tf/transform_datatypes.h>#include "mocap_optitrack/mocap_config.h"
Include dependency graph for mocap_config.cpp:
Go to the source code of this file.
Variables | |
| const std::string | FRAME_ID_PARAM_NAME = "frame_id" |
| const std::string | POSE2D_TOPIC_PARAM_NAME = "pose2d" |
| const std::string | POSE_TOPIC_PARAM_NAME = "pose" |
Variable Documentation
| const std::string FRAME_ID_PARAM_NAME = "frame_id" |
Definition at line 53 of file mocap_config.cpp.
| const std::string POSE2D_TOPIC_PARAM_NAME = "pose2d" |
Definition at line 52 of file mocap_config.cpp.
| const std::string POSE_TOPIC_PARAM_NAME = "pose" |
Definition at line 51 of file mocap_config.cpp.