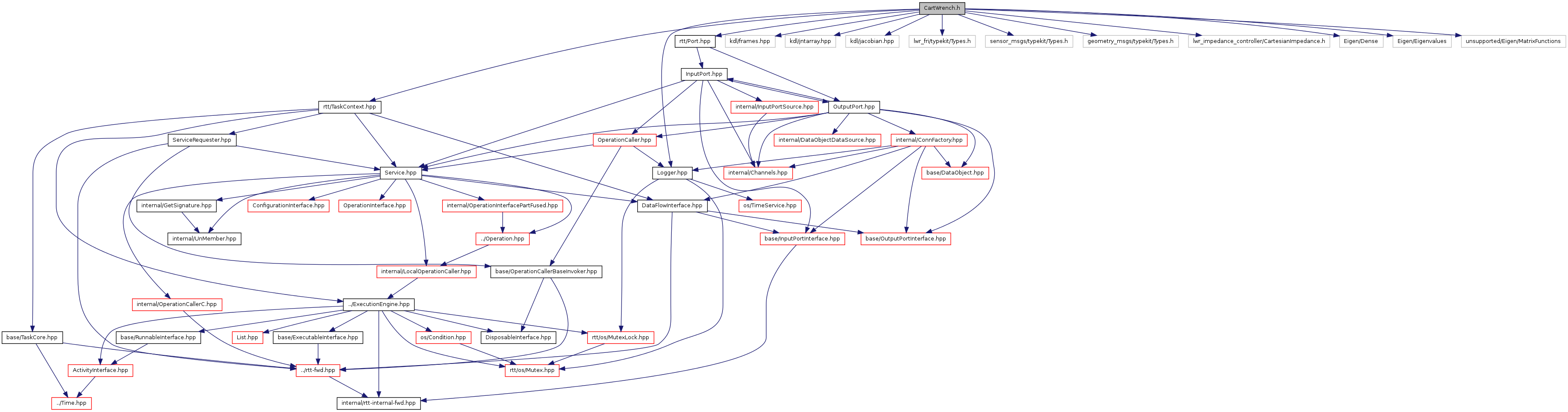
#include <rtt/TaskContext.hpp>#include <rtt/Port.hpp>#include <rtt/Logger.hpp>#include <kdl/frames.hpp>#include <kdl/jntarray.hpp>#include <kdl/jacobian.hpp>#include <lwr_fri/typekit/Types.h>#include <sensor_msgs/typekit/Types.h>#include <geometry_msgs/typekit/Types.h>#include <lwr_impedance_controller/CartesianImpedance.h>#include <Eigen/Dense>#include <Eigen/Eigenvalues>#include <unsupported/Eigen/MatrixFunctions>
Include dependency graph for CartWrench.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | lwr::CartWrench |
Namespaces | |
| namespace | lwr |
Typedefs | |
| typedef Eigen::Matrix< double, 6, 6 > | Matrix66d |
| typedef Eigen::Matrix< double, 7, 6 > | Matrix76d |
| typedef Eigen::Matrix< double, 7, 7 > | Matrix77d |
| typedef Eigen::Matrix< double, 6, 1 > | Vector6d |
| typedef Eigen::Matrix< double, 7, 1 > | Vector7d |
Typedef Documentation
| typedef Eigen::Matrix<double, 6, 6> Matrix66d |
Definition at line 30 of file CartWrench.h.
| typedef Eigen::Matrix<double, 7, 6> Matrix76d |
Definition at line 28 of file CartWrench.h.
| typedef Eigen::Matrix<double, 7, 7> Matrix77d |
Definition at line 29 of file CartWrench.h.
| typedef Eigen::Matrix<double, 6, 1> Vector6d |
Definition at line 32 of file CartWrench.h.
| typedef Eigen::Matrix<double, 7, 1> Vector7d |
Definition at line 31 of file CartWrench.h.