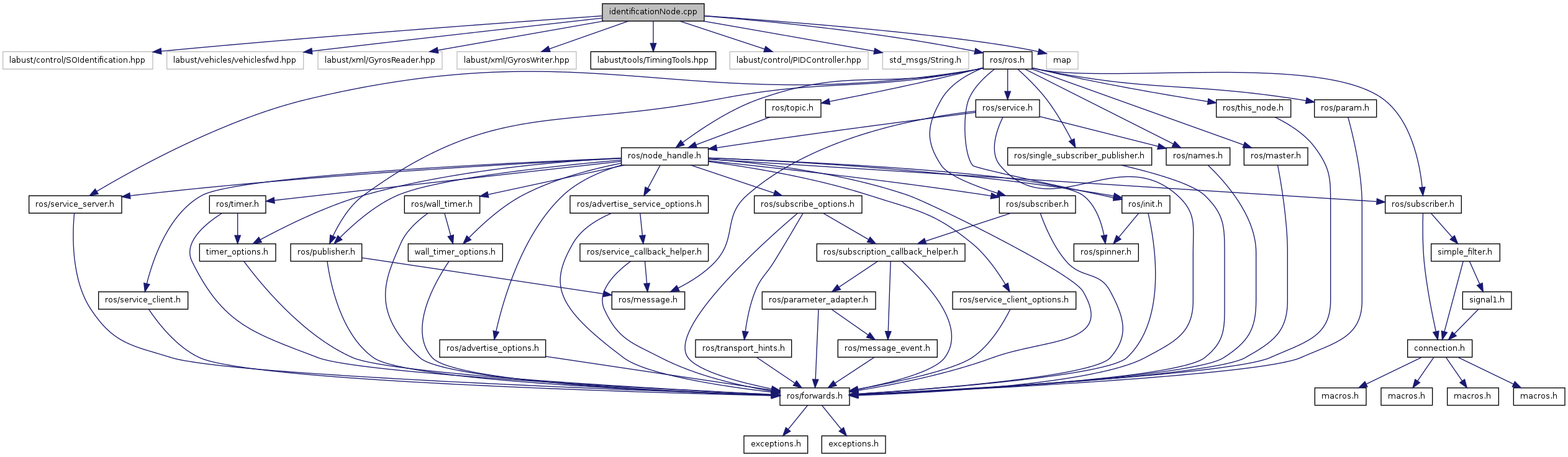
#include <labust/control/SOIdentification.hpp>#include <labust/vehicles/vehiclesfwd.hpp>#include <labust/xml/GyrosReader.hpp>#include <labust/xml/GyrosWriter.hpp>#include <labust/tools/TimingTools.hpp>#include <labust/control/PIDController.hpp>#include <std_msgs/String.h>#include <ros/ros.h>#include <map>
Include dependency graph for identificationNode.cpp:
Go to the source code of this file.
Classes | |
| struct | TuningParameters |
Functions | |
| double | lastTime (labust::tools::unix_time()) |
| int | main (int argc, char *argv[]) |
| void | onState (const std_msgs::String::ConstPtr &msg) |
| void | sendTau (double torque, const ros::Publisher &tau, double lat=0) |
| template<class PID > | |
| void | tuneController (const TuningParameters ¶m, PID *pid) |
| double | yaw (0) |
Function Documentation
| double lastTime | ( | labust::tools:: | unix_time() | ) |
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 126 of file identificationNode.cpp.
| void onState | ( | const std_msgs::String::ConstPtr & | msg | ) |
Definition at line 93 of file identificationNode.cpp.
| void sendTau | ( | double | torque, |
| const ros::Publisher & | tau, | ||
| double | lat = 0 |
||
| ) |
Definition at line 105 of file identificationNode.cpp.
template<class PID >
| void tuneController | ( | const TuningParameters & | param, |
| PID * | pid | ||
| ) |
Definition at line 69 of file identificationNode.cpp.
| double yaw | ( | 0 | ) |